
Zhe Huang, Erjing Cheng, Zhenyu Shao, Wenyang Du, Xuye Zhao, Qingde Yan. Research on Guidance Method of Double Shield TBM Based on Monocular Vision[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2415001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2415001 (2021)
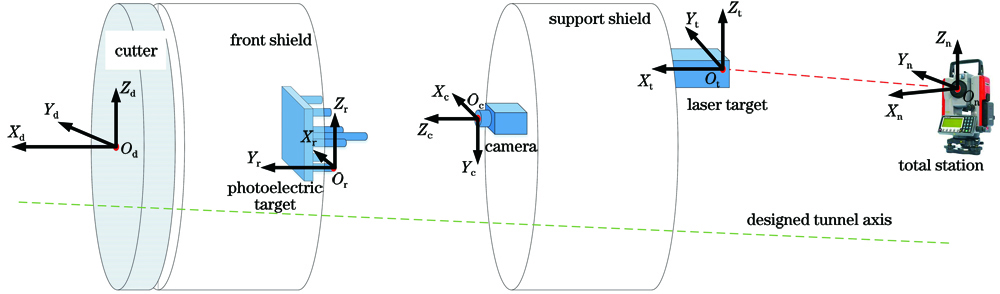
Fig. 1. Definition of coordinate system of guidance system
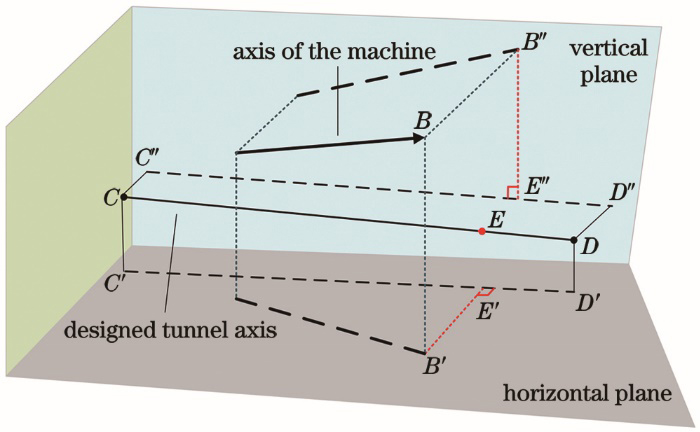
Fig. 2. Principle diagram of deviation calculation
Fig. 3. Structure diagram of photoelectric target
Fig. 4. Recognition results of feature point
Fig. 5. Experimental environment for static repeatability measurement
Fig. 6. Experimental results of static repeatability measurement. (a) Horizontal bias; (b) vertical bias; (c) pitch angle; (d) roll angle; (e) yaw angle
Fig. 7. Experimental environment for dynamic repeatability measurement
Fig. 8. Experimental results of dynamic repeatability measurement. (a) Horizontal bias; (b) vertical bias; (c) pitch angle; (d) roll angle; (e) yaw angle
Fig. 9. Experimental environment for static measurement
Fig. 10. Schematic diagram of on-site installation
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Experimental data for static accuracy measurement


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20