
Yongjian Fu, Zongchun Li, Hua He, Li Wang, Cong Li. HRegNet-LO: LiDAR Odometry Measurement Based on End-to-End Deep Neural Network[J]. Acta Optica Sinica, 2023, 43(24): 2428003
- Acta Optica Sinica
- Vol. 43, Issue 24, 2428003 (2023)
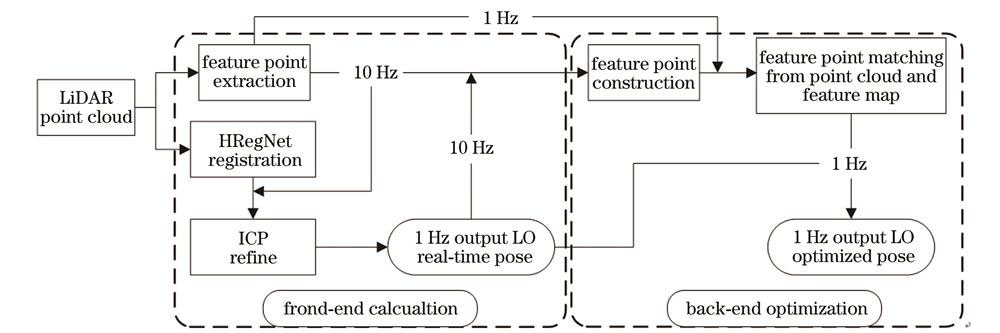
Fig. 1. Flow chart of HRegNet-LO algorithm

Fig. 2. Feature points extraction result of a point cloud
Fig. 3. Flow chart of HRegNet registration network[19]
Fig. 4. Illustration of feature points matching. (a) Point set
Fig. 5. Visualization of results of proposed algorithm on testing datasets along each coordinate axis. (a) Seq 08; (b) Seq 09; (c) Seq 10
Fig. 6. Aerial view of results of proposed algorithm on testing datasets. (a) Seq 08; (b) Seq 09; (c) Seq 10
Fig. 7. Fixed distance relative errors of three algorithms on testing datasets. (a) Seq 08; (b) Seq 09; (c) Seq 10
Fig. 8. Fixed distance relative errors of algorithms in ablation experiments. (a) Seq 08; (b) Seq 09; (c) Seq 10
|
Table 1. Details of experimental datasets
|
Table 2. Accuracy and time consuming of three algorithms on testing datasets
|
Table 3. Results of ablation experiments

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20