
Wenbo Wang, Maoyi Tian, Jiayong Yu, Chenghang Song, Jinru Li, Maolun Zhou. Improved Iterative Nearest Point Point Cloud Alignment Method[J]. Laser & Optoelectronics Progress, 2022, 59(2): 0215007
- Laser & Optoelectronics Progress
- Vol. 59, Issue 2, 0215007 (2022)
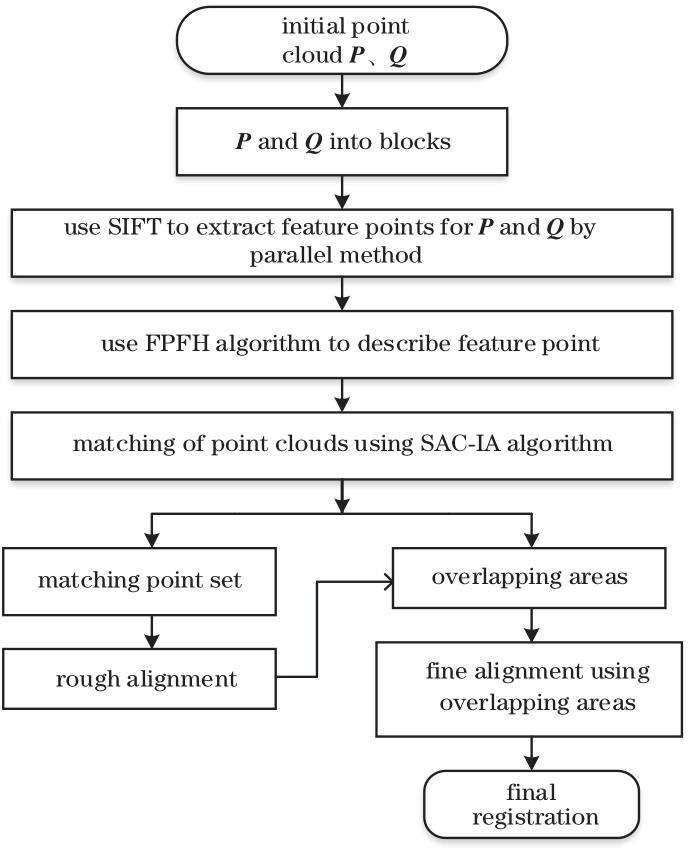
Fig. 1. Flow chart of proposed algorithm
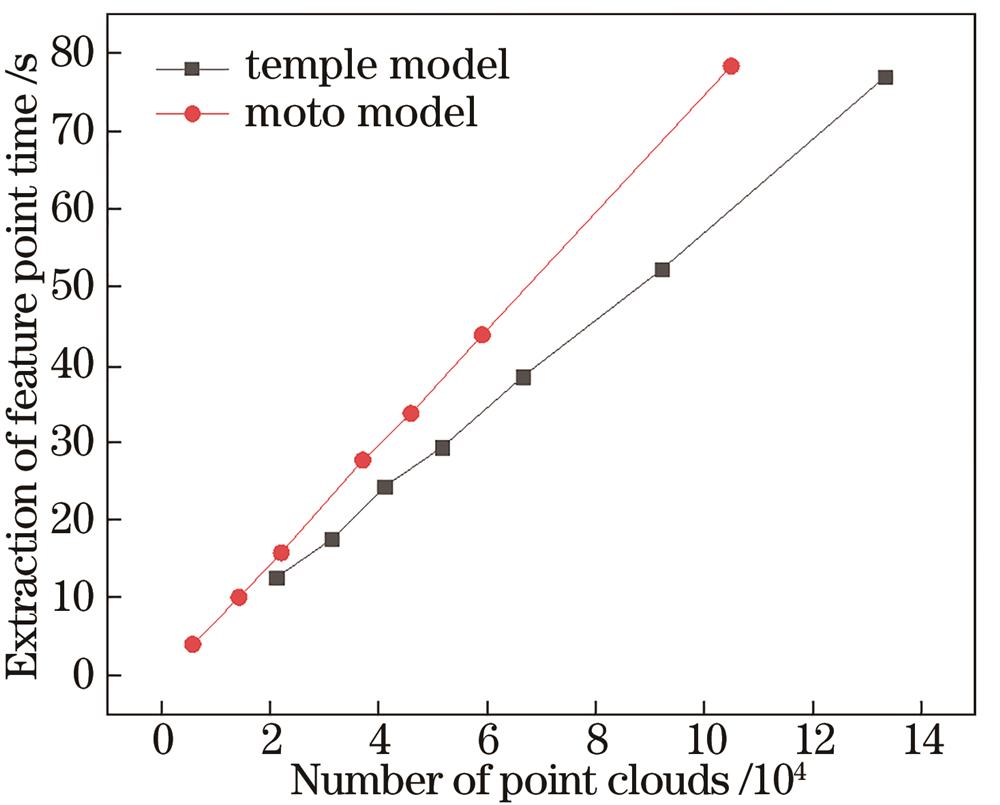
Fig. 2. Extracting feature points from different number of point clouds
Fig. 3. Local coordinate system
Fig. 4. Calculation principle of PFH
Fig. 5. Calculation principle of FPFH
Fig. 6. Point cloud visualization. (a) Source point cloud; (b) target point cloud; (c) overall point cloud
Fig. 7. Block effect of point cloud. (a) Chunking result of temple source point cloud; (b) chunking result of temple target point cloud
Fig. 8. Extracting feature points from temple point cloud. (a) Feature point extraction result of temple source point cloud; (b) feature point extraction result of temple target point cloud
Fig. 9. Extracting feature points from chunked temple point cloud. (a) Feature point extraction result of temple source point cloud after chunking; (b) feature point extraction result of temple target point cloud after chunking
Fig. 10. Extraction of overlapping point cloud regions
Fig. 11. Accurate alignment of different algorithms. (a) Precision alignment result of conventional ICP algorithm; (b) fine alignment result without extraction of overlapping areas; (c) fine alignment result after extraction of overlapping regions
|
Table 1. Time taken to extract feature points with SIFT algorithm for different number of point clouds
|
Table 2. Point cloud matching accuracy with different overlap rates
|
Table 3. Matching accuracy after extracting overlapping regions from point clouds with different overlapping rates
| ||||||||||||||||||||||||
Table 4. Comparison of running time and registration accuracy of each registration algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20