
Jiangtao Yang, Jian'an Wang, Yin Wang, Xiao Hu. Calculation Method of Three-dimensional Attitude Angle Based on Atmospheric Polarization Pattern[J]. Laser & Optoelectronics Progress, 2020, 57(22): 221107
- Laser & Optoelectronics Progress
- Vol. 57, Issue 22, 221107 (2020)
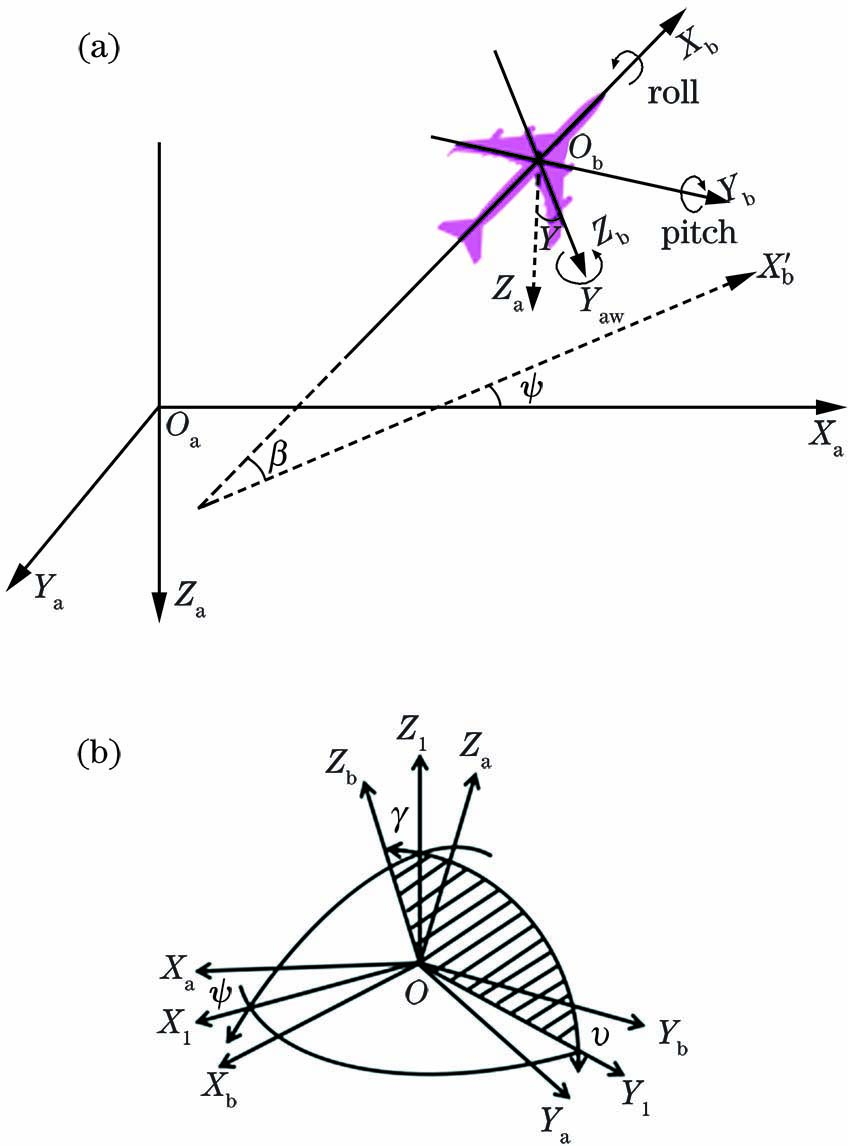
Fig. 1. Schematic of posture coordinate system. (a) coordi-nate system and coordinate transformation; (b) attitude angle transformation
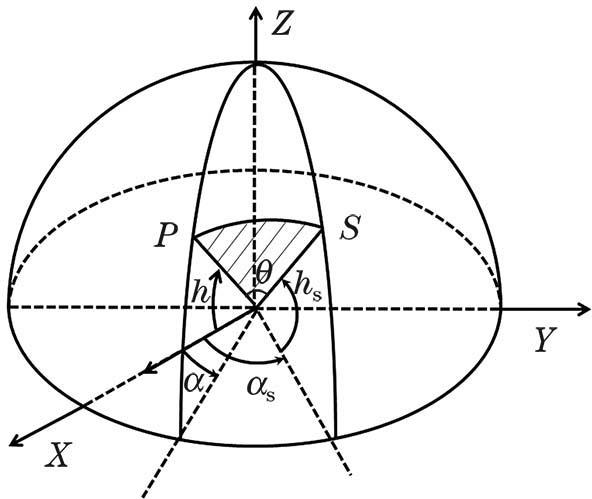
Fig. 2. Atmospheric polarization model
Fig. 3. Extraction of space position of sun. (a) Distribution of degree of polarization in entire sky; (b) K-means cluster data cluster; (c) K-means cluster center
Fig. 4. Schematic of rotation direction
Fig. 5. Reference transformation diagram
Fig. 6. Atmospheric polarization mode measurement system. (a) Test platform; (b) platform equipped with AHRS; (c) rotation axis of carrier; (d) coordinate axis of fisheye lens
Fig. 7. Simulation datas obtained by different methods. (a1)(a2) Degree of atmospheric polarization in entire sky; (b1)(b2) weighted clustering; (c1)(c2) K-mean algorithm
Fig. 8. Angle change and error distribution of pitch angle and roll angle. (a) Angle variation curves; (b) angle error variation curves
Fig. 9. Field experiment datas. (a1) (a2) Original images; (b1) (b2) polarization distribution; (c1) (c2) sun position vector
Fig. 10. Field experiment test. (a) Test angle variation curves in field experiment; (b) angle error curves in field experiment
Fig. 11. Polarized light attitude and inertial navigation system attitude comparison
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Solving results of sun position vector coordinates and attitude angle
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Solution data of detection

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20