
Xiaowen Yang, Aibing Wang, Xie Han, Rong Zhao, Yuxin Jin. Point Cloud Semantic Segmentation Based on KNN-PointNet[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2410013
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2410013 (2021)
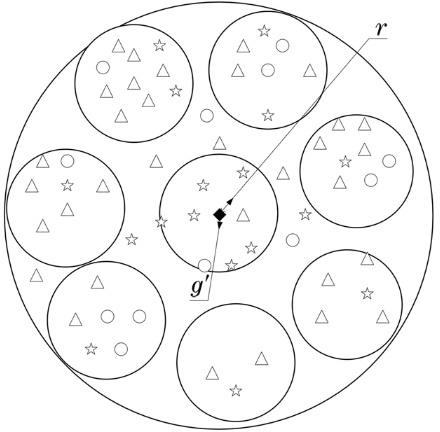
Fig. 1. Classification effect of points to be measured in local neighborhood
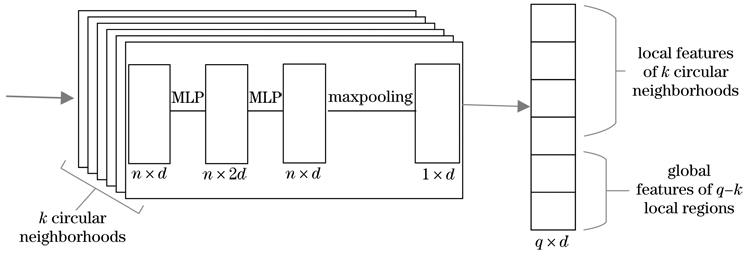
Fig. 2. local feature extraction process
Fig. 3. KNN-PointNet framework
Fig. 4. Segmentation results of improved KNN algorithm and KNN algorithm
Fig. 5. Visualization results of scene segmentation under different algorithms. (a) Original point cloud; (b) true segmentation; (c) PointNet; (d) PointNet++
Fig. 6. Visualization results of proposed algorithm
Fig. 7. Segmentation results under different k and r values
|
Table 1. Performance comparison between improved KNN algorithm and other algorithms unit: %
|
Table 2. IoU results of 13 semantic categories on S3DIS dataset for different networks unit: %

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20