
Yongkai Yin, Zonghua Zhang, Xiaoli Liu, Xiang Peng. Review of the system model and calibration for fringe projection profilometry[J]. Infrared and Laser Engineering, 2020, 49(3): 0303008
- Infrared and Laser Engineering
- Vol. 49, Issue 3, 0303008 (2020)
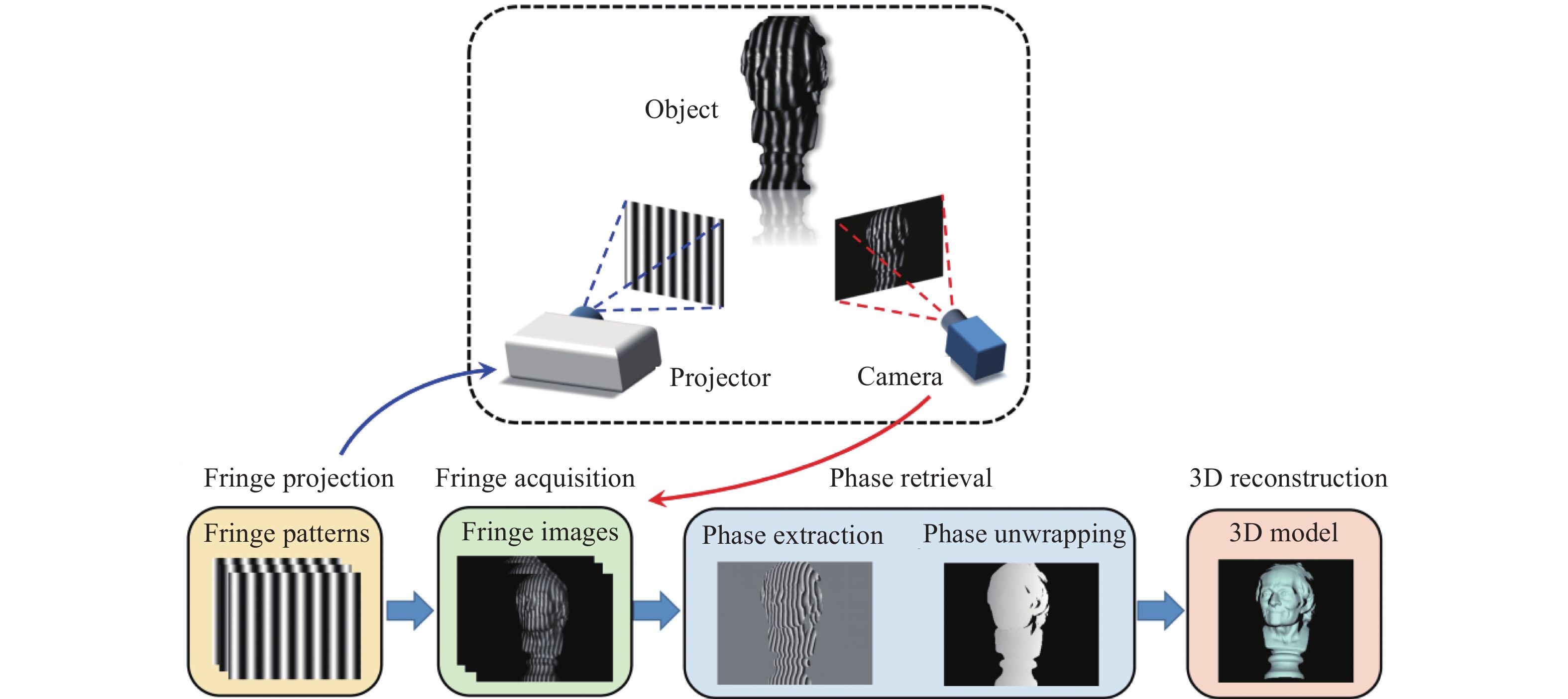
Fig. 1. Typical system diagram of the fringe projection profilometry
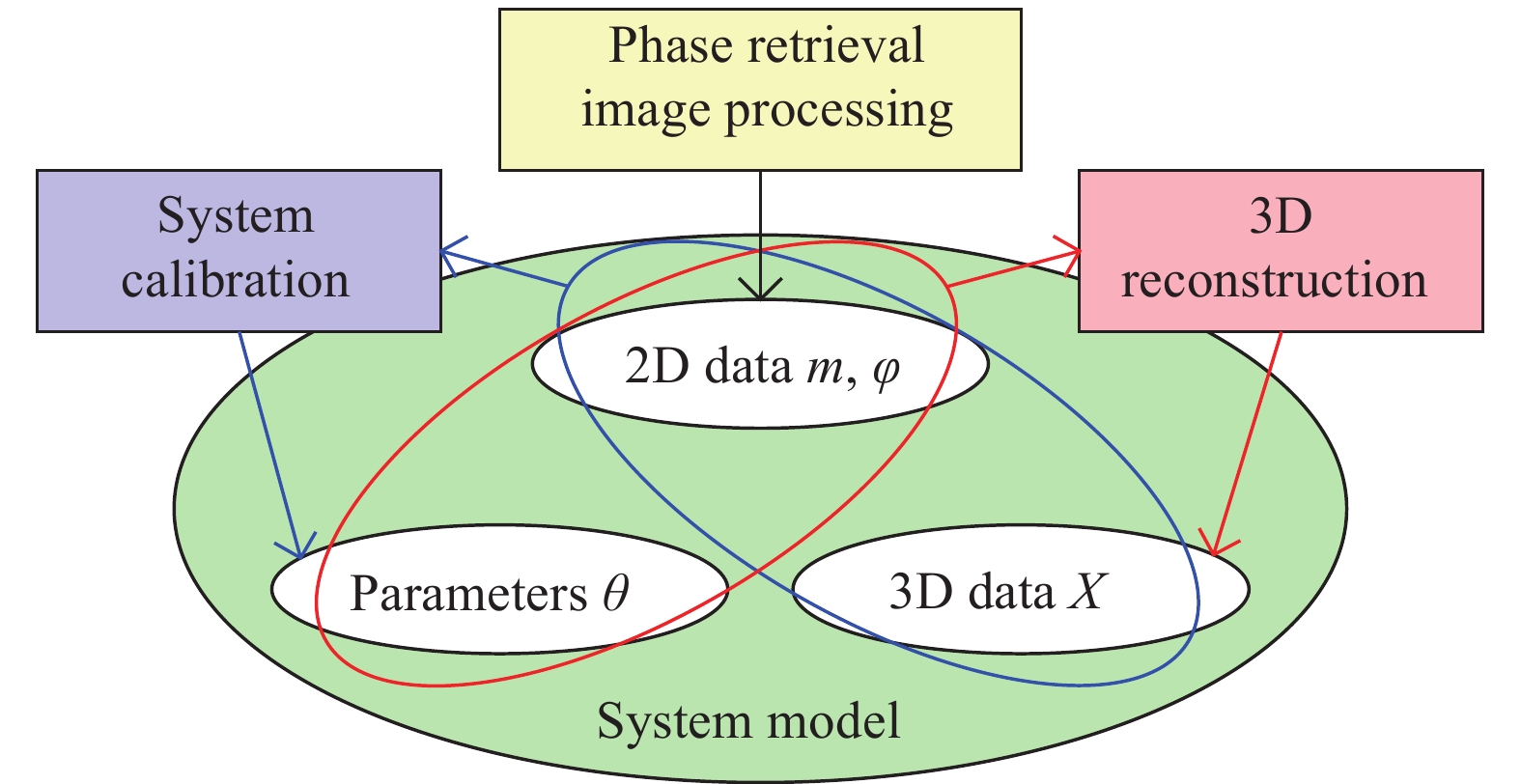
Fig. 2. Basic elements of the fringe projection profilometry and their internal relations. Here φ denotes the phase distribution; m is the 2D image coordinate; X is the 3D space coordinate; θ
Fig. 3. Schematic diagram of the phase-to-height conversion. (a) Reference plane only; (b) 3D imaging for the object
Fig. 4. Schematic illustration of an arbitrarily arranged FPP setup[35]
Fig. 5. Ray tracing of one pixel in FPP[42]
Fig. 6. Camera model
Fig. 7. Determination of the homologous image coordinate in the projection pattern according to the orthogonal phase maps
Fig. 8. Schematic of the binocular stereo vision model
Fig. 9. Translating the calibration object attached dot matrix to acquire the calibration data[47]
Fig. 10. Blocks gauges for system calibration[52]. (a) Top view of the calibration gauges; (b) Representative fringe image; (c) Calibration regions; (d) 2D shape map; (e) 3D shape map
Fig. 11. System calibration of the hybrid phase-3D model
Fig. 12. System calibration of the stereo vision model
Fig. 13. Calibrating the FPP system with the BA strategy[62]. (a) BA network consisting of different poses and benchmarks; (b) Details for the camera including the i th pose and the j th benchmark
Fig. 14. Automatic coding of the dot matrix. (a)-(c) Three dot matrix patterns that can realize automatic coding[85, 91, 97]; (d) Result of automatic coding
Fig. 15. Results of 3D reconstruction. (a) Residual error of plane fitting[61]; (b) Measured 3D shape of a step[60]
Fig. 16. Gauge spheres and its measured shape. (a) Ceramic gauge sphere pair; (b) Measured 3D data corresponding to different poses
Fig. 17. Recommended arrangement of artefacts for determination of the sphere-spacing error[101]
Fig. 18. Recommended arrangement of artefacts for determination of the flatness measurement error[101]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20