
Decheng Wang, Xiangning Chen, Feng Zhao, Haoran Sun. Vehicle Detection Algorithm Based on Convolutional Neural Network and RGB-D Images[J]. Laser & Optoelectronics Progress, 2019, 56(18): 181003
- Laser & Optoelectronics Progress
- Vol. 56, Issue 18, 181003 (2019)
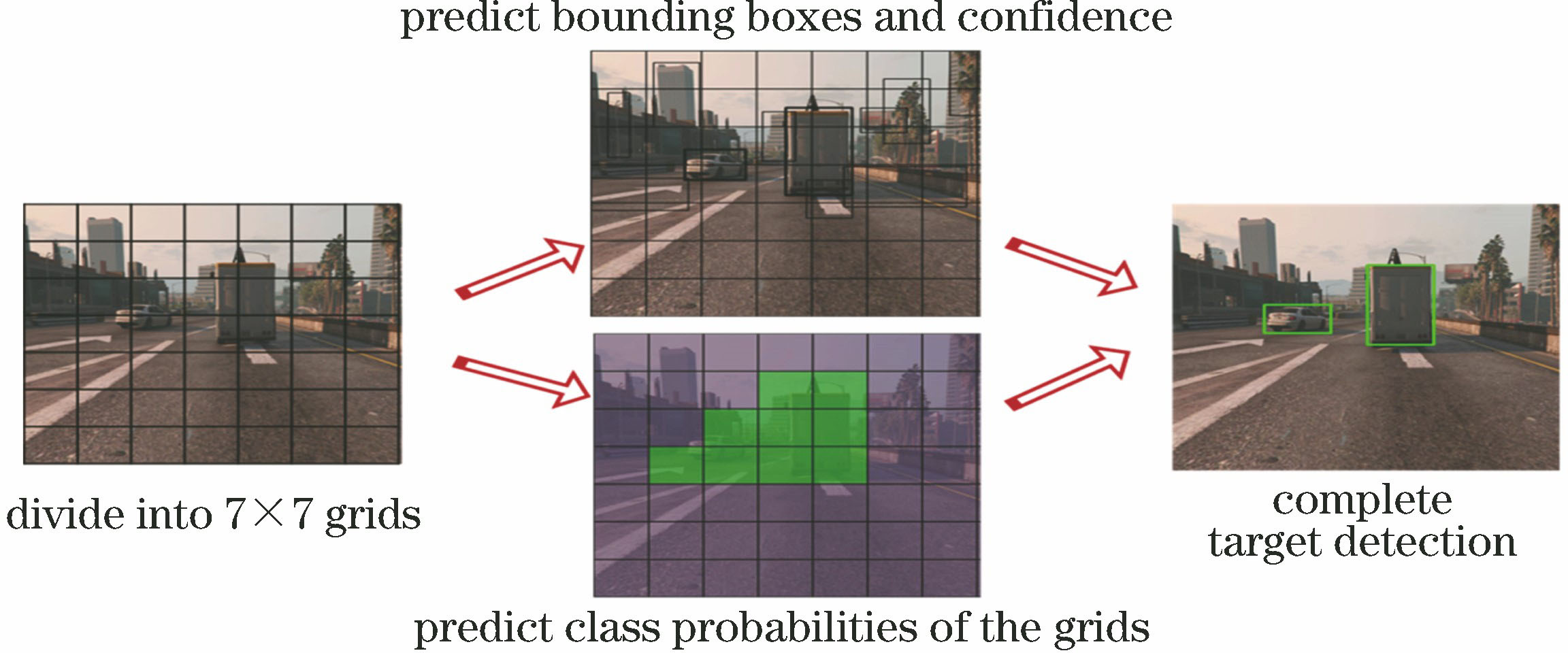
Fig. 1. Object detection model of Yolo
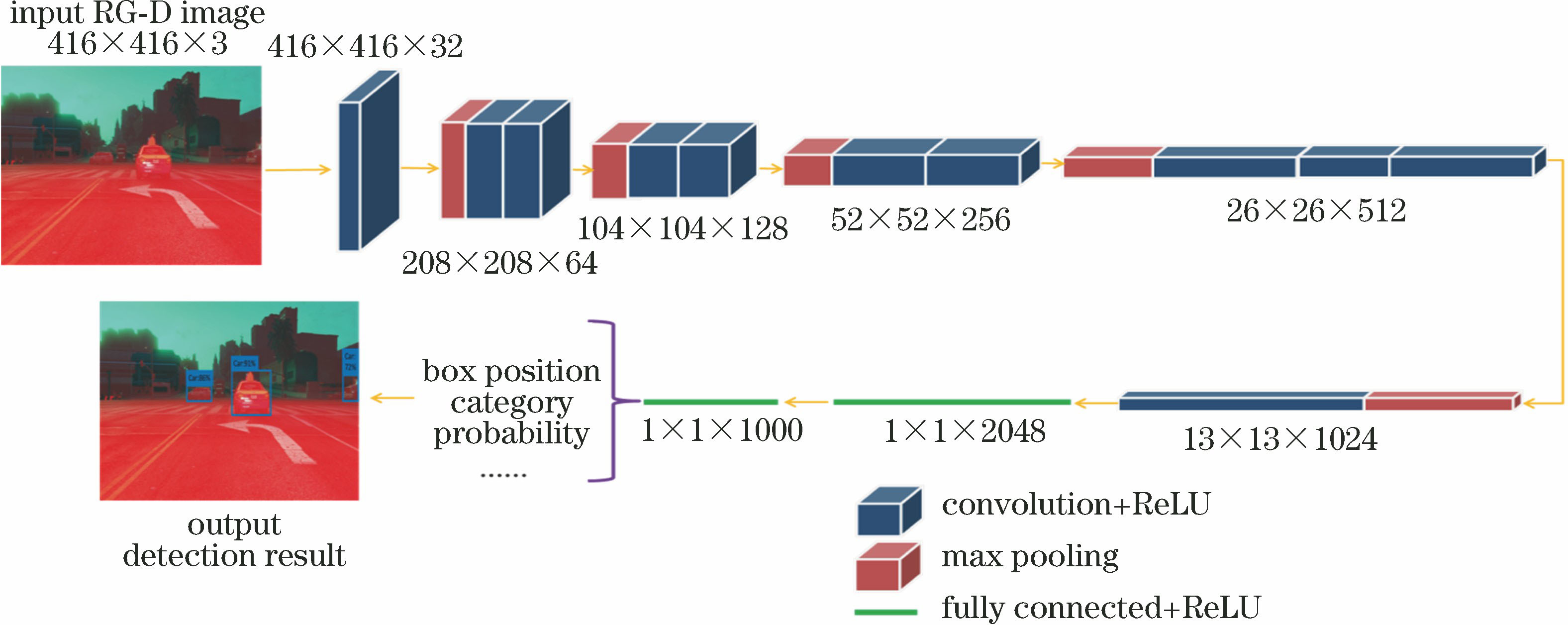
Fig. 2. S-RGD structure
Fig. 3. D-RGBD structure
Fig. 4. Experimental preprocessed images. (a) Original RGB image; (b) original depth image; (c) contrast enhanced depth image; (d) channel changed RG-D fused image
Fig. 5. Visualization of indicators in the S-RGD training processing. (a) Average RIOU curves for sampling rates of 0.01%; (b) average Rrecall curves for sampling rates of 0.01%; (c) top 500 times’ iteration of the xloss curve
Fig. 6. Vehicle detection results of using S-RGD and D-RGBD in different environments. (a) Normal environment; (b) tunnel, reflect light, night
Fig. 7. Contrast results of RGB and RGB-D target detection by Yolo v2. (a) RGB detection results; (b) RGB-D detection results
Fig. 8. Comparison of enhanced RGB images and the RGB-D images. (a) Original images; (b) RGB detection results after image enhancement; (c) RGB-D detection results
Fig. 9. Comparison between the proposed algorithm and other methods in the dataset NYU Depth v2
|
Table 1. Comparison of S-RGD and D-RGBD performance indicators
|
Table 2. Comparison of the algorithm in this paper with other target detection methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20