
Chao Xu, Xueliang Ping. Line Detection Algorithm Based on Improved Random Hough Transformation[J]. Laser & Optoelectronics Progress, 2019, 56(5): 051001
- Laser & Optoelectronics Progress
- Vol. 56, Issue 5, 051001 (2019)
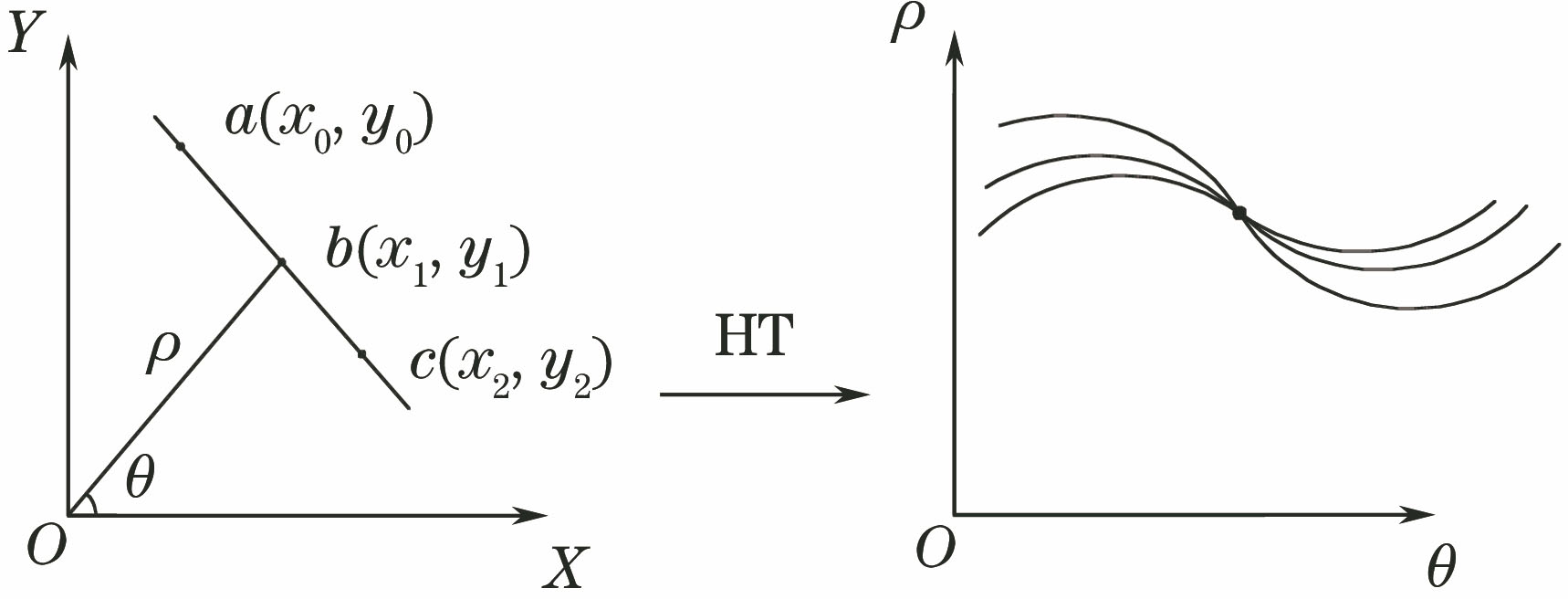
Fig. 1. Hough transformation diagram
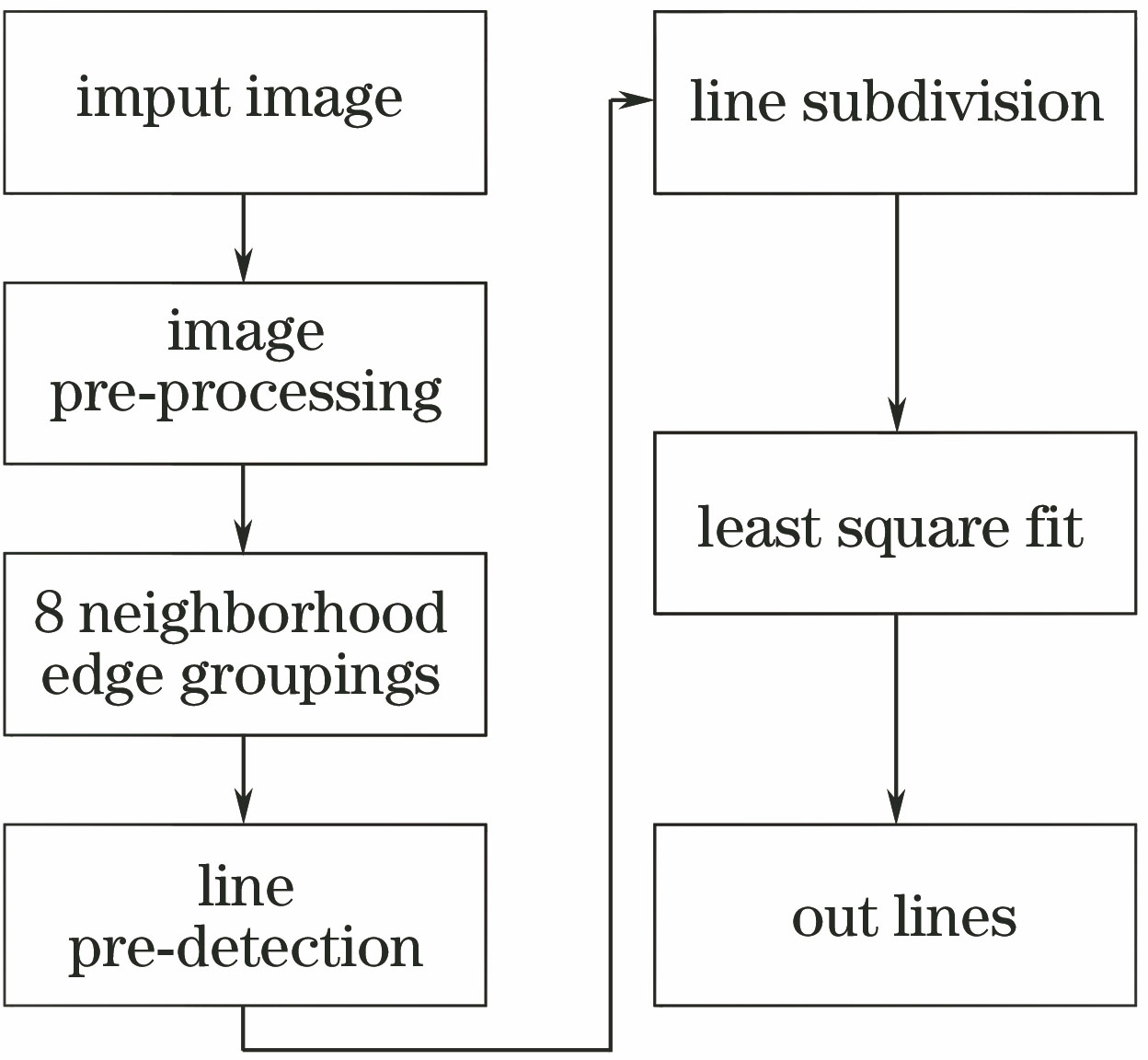
Fig. 2. Flow chart of algorithmic detection
Fig. 3. 8 neighborhoods of P0
Fig. 4. Linear edge detection based on gradient direction difference. (a) Experimental image; (b) 8 neighborhood edge group; (c) edges profile with straight line feature
Fig. 5. Linear edge detection of experimental image. (a) Standard Hough transform; (b) proposed algorithm
Fig. 6. Linear edge detection of building image. (a) Building image; (b) standard Hough transform; (c) proposed algorithm
Fig. 7. Linear edge detection based on gradient direction difference. (a) Road image; (b) edge detecting image; (c) standard Hough transform; (d) proposed algorithm
| ||||||||||||||||||
Table 1. Algorithm processing time contrast
|
Table 2. End point coordinates and line segment length


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20