
Shuai Li, Yuhong Du. Boundary Extraction of Scattered Point Cloud with Normal Estimation Based on Improved 3RDP Algorithm[J]. Laser & Optoelectronics Progress, 2021, 58(16): 1610016
- Laser & Optoelectronics Progress
- Vol. 58, Issue 16, 1610016 (2021)

Fig. 1. Original point cloud “xbox”
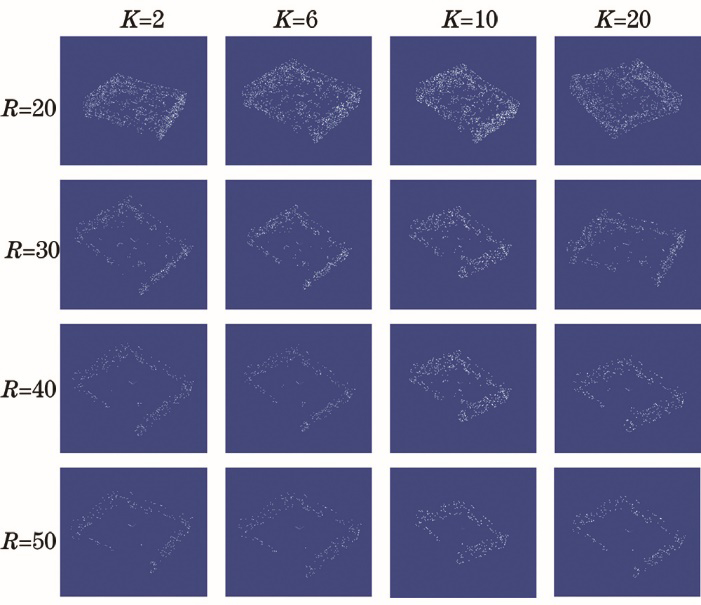
Fig. 2. Effect diagrams for different values of K and R
Fig. 3. Point set sorting process
Fig. 4. Three-dimensional Douglas-Puck algorithm diagram
Fig. 5. Comparison of rejection rates of 10 targets
Fig. 6. Contour extraction effect of Meleon40 data
Fig. 7. Preprocessing of original point cloud. (a) Real environmental objects; (b) original point cloud collected; (c) point cloud after preprocessing
Fig. 8. Contour extraction effect diagram
Fig. 9. Algorithm comparison analysis. (a) Original point cloud of Sink; (b) extraction effect of Sink using Gaussian clustering algorithm; (c) extraction effect of Sink using improved 3RDP algorithm; (d) original point cloud of Table; (e) extraction effect of Table using Gaussian clustering algorithm; (f) extraction effect of Table using improved 3RDP algorithm
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison ofnormal line estimation algorithm and improved RDP algorithm
|
Table 2. Effect of point cloud extraction of 11 targets
|
Table 3. Comparison of improved 3RDP algorithm and Gaussian clustering algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20