
Bo Liu, Yang Yu, Zhen Chen, Weiqiang Han. True random coded photon counting Lidar[J]. Opto-Electronic Advances, 2020, 3(2): 190044-1
- Opto-Electronic Advances
- Vol. 3, Issue 2, 190044-1 (2020)
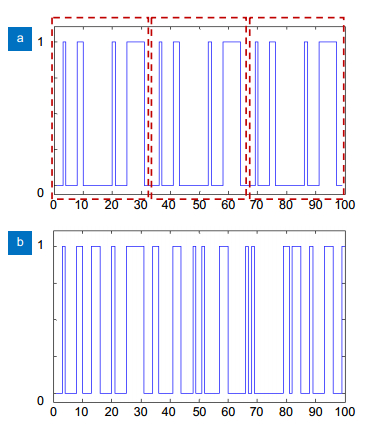
Fig. 1. (a) Pseudo-random sequence and (b) true random sequence.
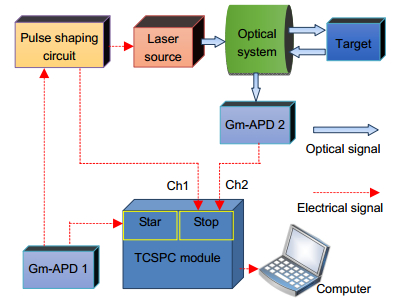
Fig. 2. True random coded photon counting Lidar system.
Fig. 3. Normalized auto-correlation function of the true random sequence
Fig. 4. Normalized auto-correlation range images with two different echo photons number for the true random coded method and the pseudo-random coded method.
Fig. 5. The detection probability statistical results of the true random coded method and the pseudo-random coded method at different mean echo photons number.
Fig. 6. Normalized cross-correlation range images for the true random sequence (a) and the sparse pseudo-random sequence (b).
Fig. 7. (a) The picture of the model car and (b) three-dimensional scanning imaging of the model car.
|
Table 1. Main parameters of the Lidar system.
|
Table 2. Key parameters for the depth profile measurement.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20