
Xiaozheng Ban, Zhihua Li, Beibei Li, Minda Xu. Sparse Image Reconstruction Based on Improved Total Generalized Variation[J]. Laser & Optoelectronics Progress, 2018, 55(11): 111103
- Laser & Optoelectronics Progress
- Vol. 55, Issue 11, 111103 (2018)
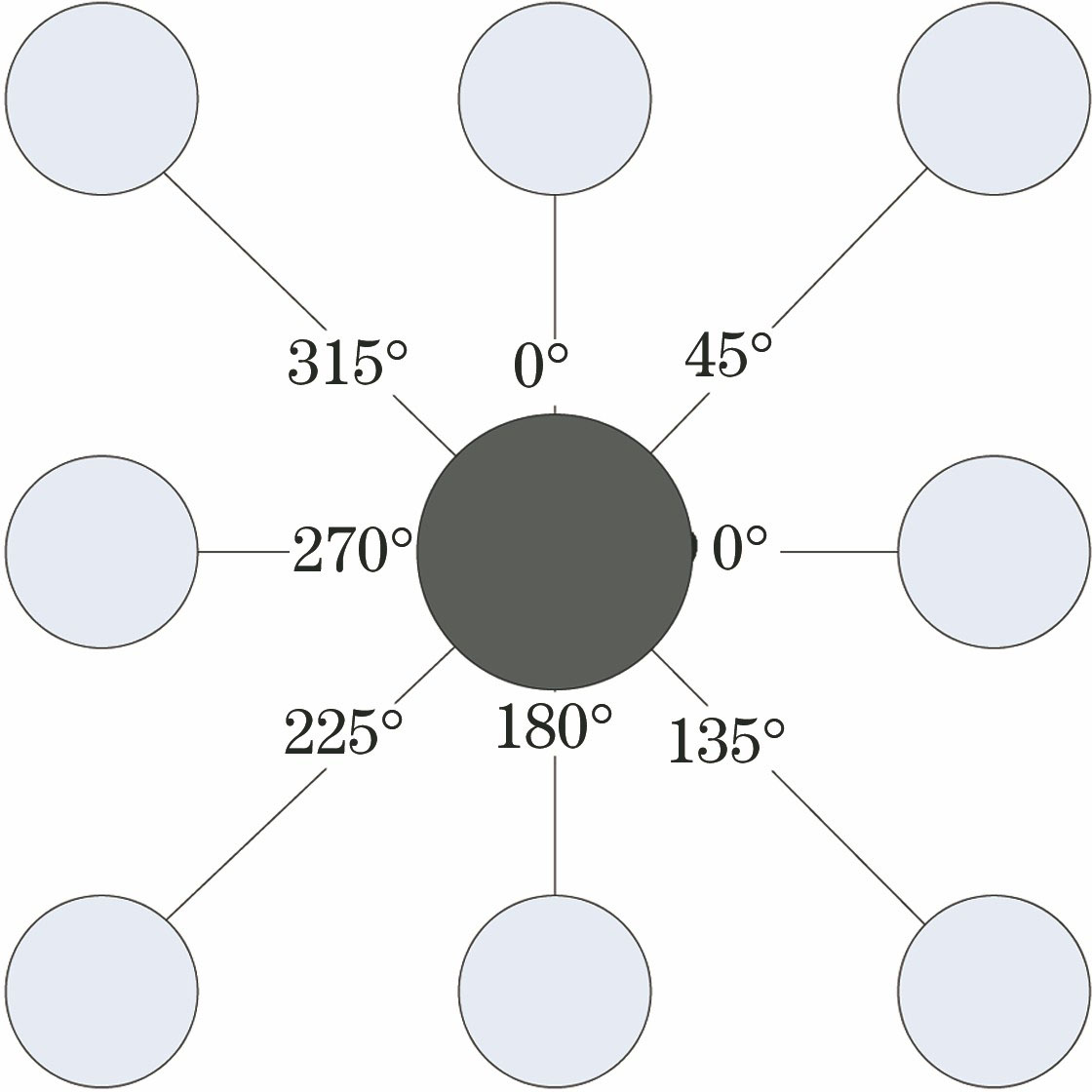
Fig. 1. Eight neighborhoods of pixel points
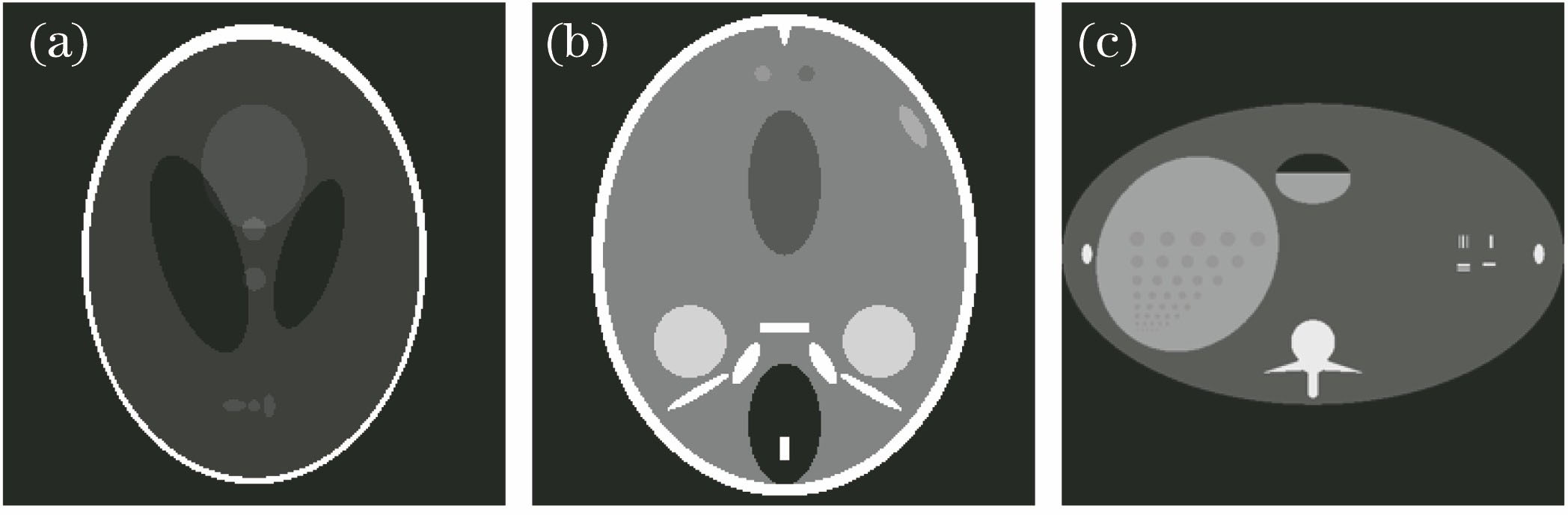
Fig. 2. Image data used in the test. (a) Sheep-Logan image; (b) Forbild-Head image; (c) Forbild-Abdomen image
Fig. 3. ROI regions of the test images. (a) Sheep-Logan image; (b) Forbild-Head image; (c) Forbild-Abdomen image
Fig. 4. Reconstructed image and ROI comparison of different algorithms in finite angle (Sheep-Logan). (a) Original image; (b) L1-Bregman algorithm; (c) TV-ADM algorithm; (d) TVAL3 algorithm; (e) TGV-ADM algorithm; (f) proposed algorithm
Fig. 5. Reconstructed image and ROI comparison of different algorithms in finite angle (Forbild-Head). (a) Original image; (b) L1-Bregman algorithm; (c) TV-ADM algorithm; (d) TVAL3 algorithm; (e) TGV-ADM algorithm; (f) proposed algorithm
Fig. 6. Reconstructed image and ROI comparison of different algorithms in finite angle (Forbild-Abdomen). (a) Original image; (b) L1-Bregman algorithm; (c) TV-ADM algorithm; (d) TVAL3 algorithm; (e) TGV-ADM algorithm; (f) proposed algorithm
Fig. 7. Reconstructed image and ROI comparison of different algorithms in sparse angle (Sheep-Logan). (a) Original image; (b) L1-Bregman algorithm; (c) TV-ADM algorithm; (d) TVAL3 algorithm; (e) TGV-ADM algorithm; (f) proposed algorithm
Fig. 8. Reconstructed image and ROI comparison of different algorithms in sparse angle (Forbild-Head). (a) Original image; (b) L1-Bregman algorithm; (c) TV-ADM algorithm; (d) TVAL3 algorithm; (e) TGV-ADM algorithm; (f) proposed algorithm
Fig. 9. Reconstructed image and ROI comparison of different algorithms in sparse angle (Forbild-Abdomen). (a) Original image; (b) L1-Bregman algorithm; (c) TV-ADM algorithm; (d) TVAL3 algorithm; (e) TGV-ADM algorithm; (f) proposed algorithm
Fig. 10. Comparison of vertical cross-sectional views of 135th column of each reconstruction image. (a) Sheep-Logan image; (b) Forbild-Head image; (c) Forbild-Abdomen image
|
Table 1. Initialization parameters
|
Table 2. Comparison of objective evaluation parameters of reconstructed images of various algorithms under finite projection angle
|
Table 3. Comparison of objective evaluation parameters of reconstructed images of various algorithms under sparse projection angle

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20