
Li Qingwu, Zhou Yaqin, Ma Yunpeng, Xing Jun, Xu Jinxin. Salient Object Detection Method Based on Binocular Vision[J]. Acta Optica Sinica, 2018, 38(3): 315002
- Acta Optica Sinica
- Vol. 38, Issue 3, 315002 (2018)
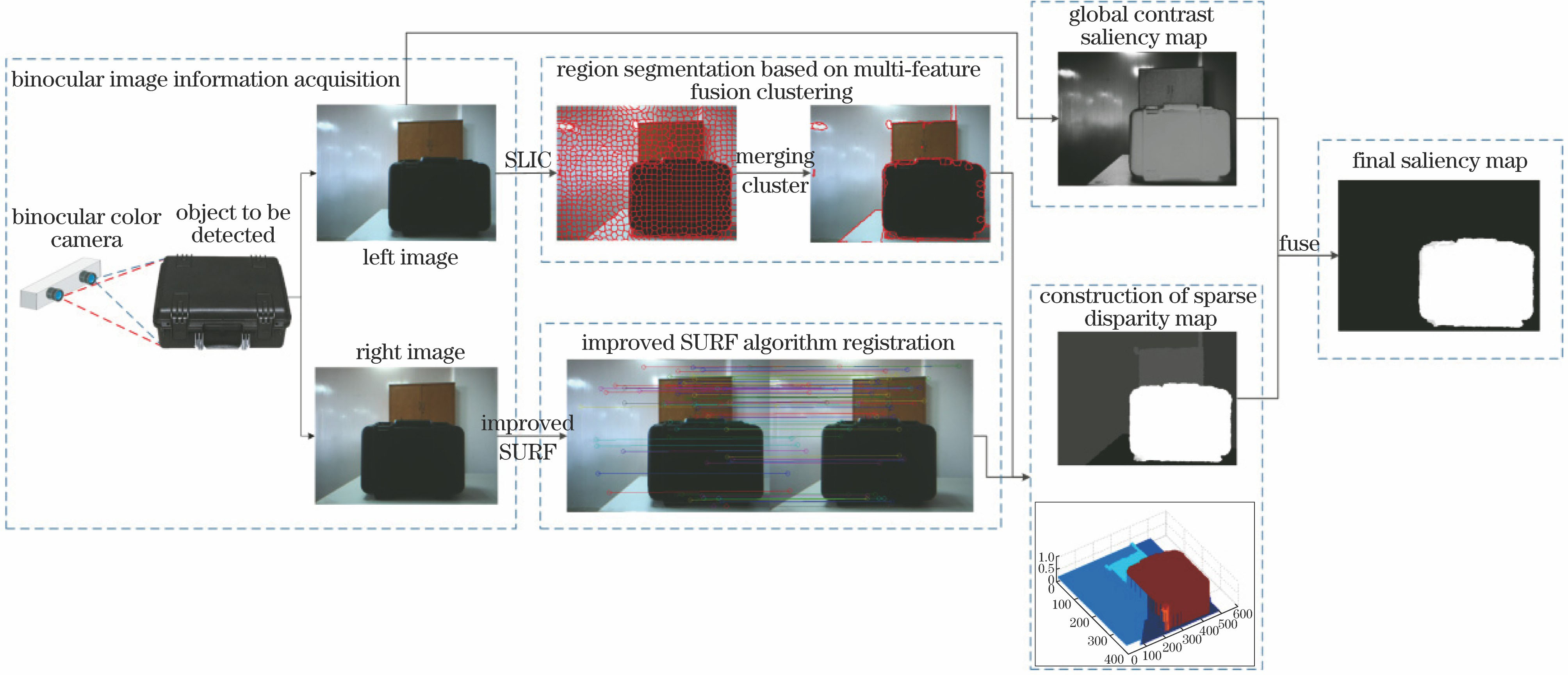
Fig. 1. Flow chart of the proposed algorithm
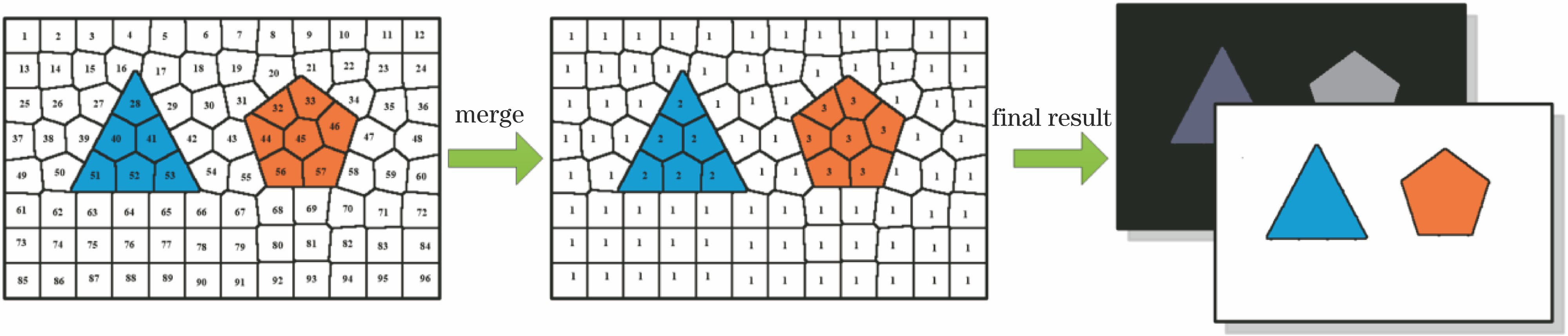
Fig. 2. Schematic of region segmentation based on multi-feature fusion clustering
Fig. 3. Schematic of superpixel merging strategy
Fig. 4. Schematic of matching strategy
Fig. 5. Schematic of sparse disparity construction. (a) Matching point pairs; (b) match points in the merged regions; (c) sparse disparity; (d) stereo image of sparse disparity
Fig. 6. Limitation of depth saliency detection
Fig. 7. Comparison of saliency map fusion and background suppression results. (a) Original left image; (b) sparse disparity map; (c) FT global saliency map; (d) FT regional mean saliency map; (e) fusing saliency map; (f) saliency map of results after background interference
Fig. 8. Operation interface of simulation software
Fig. 9. Comparison of saliency maps generated by the proposed algorithm and global contrast algorithms. (a) Original left image; (b) original right image; (c) GT algorithm; (d) proposed algorithm; (e) LC algorithm; (f) FT algorithm; (g) HC algorithm; (h) PCA algorithm
Fig. 10. Comparison of saliency maps generated by the proposed algorithm and local contrast algorithms. (a) Original left image; (b) original right image; (c) GT algorithm; (d) proposed algorithm; (e) AC algorithm; (f) CA algorithm; (g) SEG algorithm
Fig. 11. Comparison of saliency maps generated by the proposed algorithm and prior information algorithms. (a) Original left image; (b) original right image; (c) GT algorithm; (d) proposed algorithm; (e) DSR algorithm; (f) GR algorithm; (g) RBD algorithm; (h) LPS algorithm; (i) MILPS algorithm
Fig. 12. P-R curves of the proposed method and other algorithms. (a) Comparison with the global contrast algorithm; (b) comparison with the local contrast algorithm; (c) comparison with the prior information algorithm
Fig. 13. MAE, AUC, F value histograms of the proposed method and other algorithms. (a) Comparison with the global contrast algorithm; (b) comparison with the local contrast algorithm; (c) comparison with the prior information algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20