
Miao Cai, Zhi-Xiang Li, Hao-Dong Wu, Ya-Ping Ruan, Lei Tang, Jiang-Shan Tang, Ming-Yuan Chen, Han Zhang, Ke-Yu Xia, Min Xiao, Yan-Qing Lu. Surpassing the standard quantum limit of optical imaging via deep learning[J]. Chinese Optics Letters, 2023, 21(8): 082701
- Chinese Optics Letters
- Vol. 21, Issue 8, 082701 (2023)
Abstract
1. Introduction
Optical measurement with sensitivity as high as possible is highly demanded in various science and technology, ranging from biology and astronomy to quantum information[1–3]. However, the sensitivity of optical measurements is ultimately limited by the shot noise due to the quantum fluctuation of occupation of the probe field, imposing a constraint on the standard quantum limit (SQL) to the sensitivity limit[4–8]. Quantum resources such as squeezed quantum states[2,3,9–12] and highly entangled states[13–16] have been proposed and successfully used to improve the measurement sensitivity beyond the SQL. Squeezed vacuum fields have also been exploited to reduce the noise level below the SQL in optical interferometers[3,10]. Nevertheless, the squeezing-resulting improvement is easily destroyed by loss and phase noise. Thus, a deeply squeezed light is required to achieve a sensitivity far beyond the SQL but is very challenging to be prepared for a strong light. Alternatively, weak measurements[17–20] have been proposed for beating the SQL in special circumstances. A nonlinear interferometer combined with quantum entanglement can even beat the Heisenberg limit of measurement[2,21–25]. It is desirable to develop an approach for surpassing the SQL within a broadband and valid for a strong light including a huge number of photons.
Deep learning (DL) has become the working horse of improving performance of pattern recognition[26,27], quantum information technology[28], and imaging[29–32]. DL mathematically treats noise as a random fluctuation of signals and has demonstrated the capability of beating some fundamental limit in physics such as the diffraction limit[30,33]. Note that machine learning has been exploited to achieve a sensitivity scaling better than the SQL. Nevertheless, it still requires entangled qubits in measurement[34]. Here we show that a DL neural network with the “noise2noise” protocol can suppress quantum noise without prior knowledge of a clean signal. Our work, which is free of using quantum entanglement or squeezing of the probe field such as entanglement or squeezing, provides a general approach to beat the SQL in the classical regime.
2. DL-Based Denoising Protocol
In the mathematical sense, DL can reduce random fluctuations of a detected signal, irrespective of the origin of the noise. Considering that the obtained signal is noisy in the practical measurement, we utilize the so-called noise2noise DL protocol, which can exploit the noisy signal as a target to reduce the noise in detection. In principle, a neural network depicted in Fig. 1(a) can be modeled as a regressor function , where is the network parameter set. After the DL network is fed with a set of data pairs of noisy inputs and noisy targets , the regressor function and its parameter set can be determined by the training process. The basic idea of neural network training is to minimize error between the network outputs and the given targets. The training process can generally be mathematically described as , where is the loss function measuring error between the network output and the target. By specifying this loss function as a loss function, namely the least squared error, we exploit the DL noise2noise protocol.
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
![]()
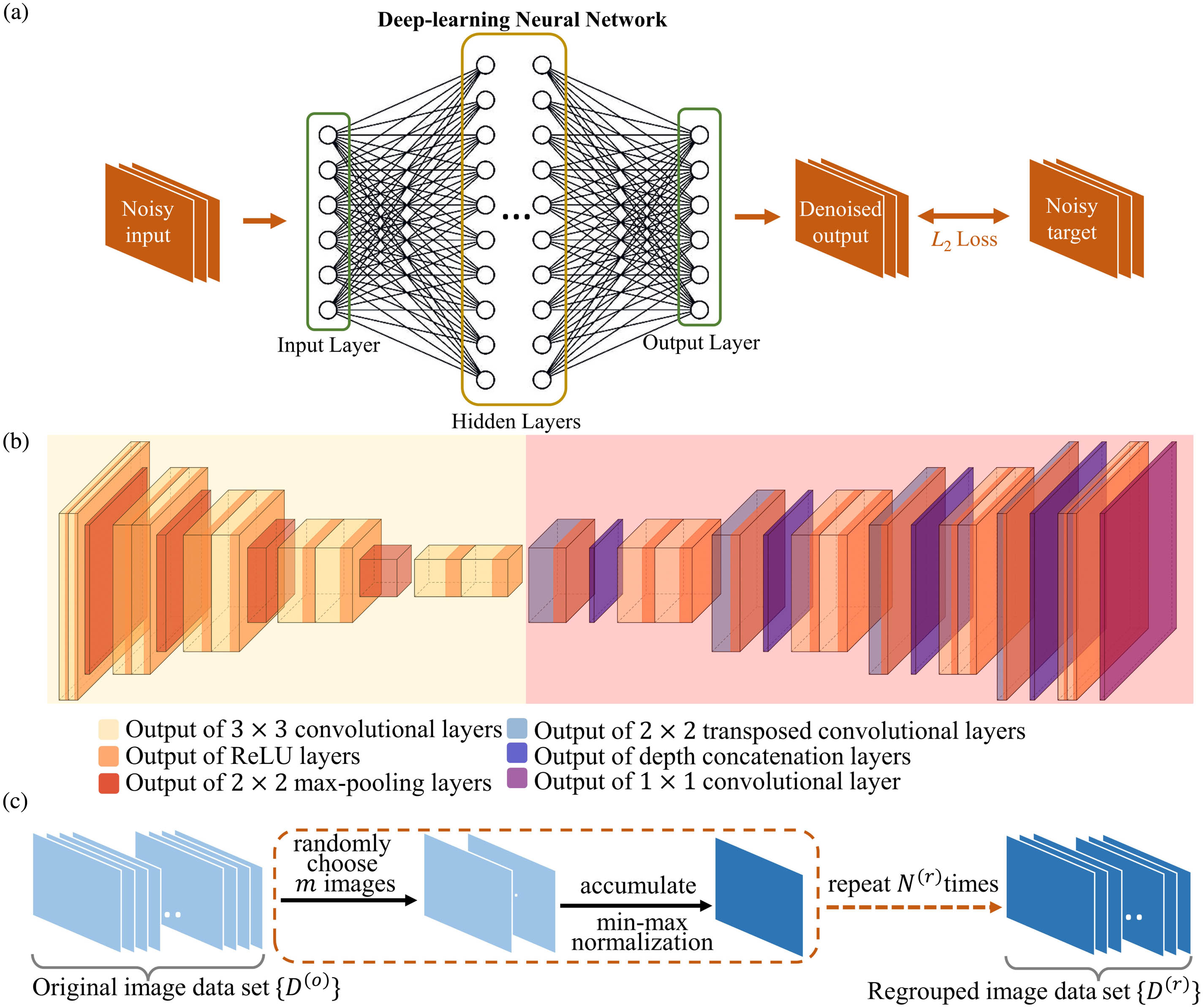
Figure 1.(a) Schematic of the noise2noise protocol. Both the inputs and targets during training are noisy data, and the loss function is L2 loss. With this protocol, the well-trained DL neural network can denoise the input noisy signal. (b) Diagram model for U-net. The structure includes two parts: the contracting part (left yellow area) and the expansive part (right pink area). Each slab represents a layer in the neural network. Colors indicate different types of layers, as shown by legends. (c) Schematic of data set preparation process. First, we randomly choose m frames from the original image data set {D(o)}. These frames generate a new image through accumulation and min-max normalization. This procedure is repeated N(r) times to obtain the regrouped image data set, including N(r) frames. Then, the new data set is used for training.
We now explain how a neural network with the noise2noise protocol can be used to suppress the shot noise and subsequently beat the SQL in measurement. We consider an observed imaging with noise in our optical measurement given by[35]
In the noise2noise protocol, the input and target data sets are noisy data sets and , respectively. Then, we can mathematically describe the training process of the DL neural network with loss as
To minimize the loss in Eq. (3), needs to satisfy
Importantly, the nonlinear feedback enables the DL neural network to surpass the SQL for optical imaging. Physically, the probe field seen by a pixel collapses to a photon number state during each measurement. The photon number state can vary pixel by pixel and also fluctuate as measurement is ongoing. This fluctuation includes the shot noise and leads to the quantum standard limit in classical optical measurement. Now, we consider our DL-enhanced imaging. Assuming the original imaging has reached the standard quantum limit, which is reasonable in this coincidence imaging, the obtained image frame during each measurement can be modeled as
After the training is completed, for new input data at pixel , the DL neural network returns an output as
Here represents the photon number distribution given by well-trained DL network and is different from that of because of the nonlinear feedback. With the training process of Eq. (2), the loss between and is as small as possible. Then, the variance of , meaning the suppressed noise, can reduce to a level well below the shot noise.
This work shows the capability of using the noise2noise-based DL scheme to surpass the SQL in practical imaging. Note that optical imaging here, surpassing the SQL means to improve the signal-to-noise ratio (SNR) above the constraint imposed by the shot noise, when the overall number of photons is fixed during measurement. In practical measurement, the traditional noise2clean-based DL denoising approach may use the averaged image with a long exposure time as the clean target image. The available maximal SNR is up to that of the averaged image. These traditional methods need more photons or quantum resources. Therefore, they cannot surpass the SQL.
We used an end-to-end DL neural network, called U-net[36]. The specific structure of the U-net is shown in Fig. 1(b). It includes two parts: the contracting path (yellow area) and the expansive path (pink area). The contracting path consists of four repeating encoder units. Each encoder unit has five layers: two convolutional layers followed by a rectified linear unit (ReLU), and a max pooling layer as the encoder unit. The contracting path extracts a multiscale latent representation of the input image. The expansive path also consists of four repeating decoder units. Each decoder units has seven layers: two convolutional layers, each followed by a ReLU, one transposed convolutional layer followed by a ReLU, and then a depth concatenation layer. In the end of the expansive path, there is a convolutional layer as the final output layer. This comprehensive expansive path decompresses the representation from the contracting path to complete an end-to-end DL of target images.
Our DL-based denoising scheme can be divided into two stages: data preparation and training. The data preparation stage is depicted in Fig. 1(c). The th frame original image data obtained in experiment are denoted as with , where is the total number of image frames. In our experiment, we conduct the single-photon coincidence imaging with heralded single photons. Each original image frame only contains a few photons and is unsuitable for neural network training. In the data preparation stage, we randomly choose frames with equal probability from and then accumulate them into a new image frame. We apply min-max normalization on it. This procedure is repeated times. In doing so, we obtain a new image data set consisting of image frames. This new data set is equally divided into an input set and a target set. Each input frame corresponds to a target frame to form a noise2noise training pair. These pairs are then used in the training of the U-net. The training procedure updates the weights of the DL neural network. Once training finishes, we accumulate all the well-trained output image frames into the final denoised image. Our U-net training process is performed on an Intel Xeon Platinum 8180 CPU with MATLAB R2021a (see detailed hyperparameters in Appendix B).
3. Experimental Setup for Coincidence Imaging
We experimentally validate the suppression of the shot noise by using a DL neural network with the noise2noise DL protocol in single-photon coincidence imaging. Our experimental setup for generating the single-photon Airy pattern in each shot is shown in Fig. 2(a). We generate polarization-entangled heralded single photons from a spontaneous parametric downconversion process in a Sagnac interferometer embedded with a PPKTP crystal[37]. The generation rate of correlated photon pairs is 9 kHz with a 5-ns coincidence measurement time window. Signal photons generated from the spontaneous parametric downconversion process are coupled out from an optical fiber with a fiber port and then pass through a polarizing beam splitter. After that, these single photons are incident on a reflective spatial light modulator (SLM) with the desired cubic phase modulation. The SLM generates the Airy pattern at the focal plane of lens . Generally, this SLM can be replaced with any scattering objects. Idler photons are collected to trigger the iCCD for detection of signal photons. The optical gate width of iCCD is set as 5 ns. The iCCD is in the integrate-on-chip mode with an exposure time , which determines the accumulating period of signal photons before the imaging is read out. A 22-m-long optical fiber is used as a delay line to compensate for the electric delay of the iCCD. This ensures that signal photons reach the camera at the same time when the camera is triggered by the heralding detection of idler photons, which is in temporal correlation with signal photons. To make a convincing comparison between the shot noise and our DL-enhanced results, we use a trivial coincidence imaging to mimic the background noise other than the shot noise by switching on the time gate of the iCCD only when signal photons arrive. In our setup, signal photons are scattered by the object and directly detected by the iCCD. Thus, our arrangement is essentially different from the standard ghost imaging, in which photons in the scattering path are detected for triggering the detection of reference photons[38,39]. Here, the temporal correlation between idler and signal photons is explored to generate a gate signal for switching on the iCCD. It can be replaced with an electric gate signal if coherent laser pulses are used for imaging.
![]()
Figure 2.Single-photon coincidence imaging of an Airy pattern. (a) Experimental setup. QWP, quarter-wave plate; HWP, half-wave plate; PBS, polarizing beam splitter; M, mirror; SPCM, single-photon counting module; PM, phase modulation; SLM, spatial light modulator; DM, dichroic mirror; DPBS, dual-wavelength PBS; DHWP, dual-wavelength HWP. An SLM is used as a scattering object to generate the Airy pattern. (b) Images accumulated over 1, 50, 500, and 5000 frames, respectively. The exposure time are Δte = 0.2 s. (c) Positions of the pixels (red points) that are chosen to calculate the variance in (d); (d) variance of the photon-number distribution versus the mean photon number
4. Beating the Shot Noise with DL
The small value of the conditional second-order correlation function clearly shows that the heralded single-photon source has a good single-photon nature and the two- or multiphoton events can be neglected (see details in Appendix A). The coincidence imaging is conducted in the setup shown in Fig. 2(a). Figure 2(b) shows the observed image accumulated over a single frame, 50 frames, 500 frames, and 5000 frames, respectively. For each frame, the exposure time is . These images clarify the single-photon coincidence imaging.
We first characterize noise in our experiment. According to Ref. [40], the shot noise of a light field detected by the iCCD can be described as
Figures 2(c) and 2(d) confirm that our experiment is shot-noise-limited. In experiment, the exposure time of each frame is set to . We collect 10,000 original imaging frames. As shown in Fig. 2(c), we choose 100 pixels indicated by the red dots in all 10,000 frames to calculate the mean photon flux and the corresponding noise variance . The results are shown in Fig. 2(d). Clearly, the variance increases linearly with . The value of the mean phonon number is the original readout brightness of the iCCD. It is proportional to the “real” photon number, according to the working mechanism of the iCCD. This verifies that our experiment system is shot-noise-limited.
Figure 3 shows that our DL algorithm can greatly reduce the noise of imaging. We measure the single-photon Airy pattern with and 0.5 s, respectively. For each , the data set consists of 5000 original frames. The experimental images are directly accumulated from the original data set and then min-max normalized. They are equivalent to the standard averaged results, being subject to the SQL. To obtain DL-enhanced images, we create the training data set according to the procedure depicted in Fig. 1(c) with parameters and . Then, this data set is fed into the neural network. The top and side views of the experimental and DL-enhanced images are illustrated in the left and middle columns. Some subtle peaks are overwhelmed by strong noise in the original images and thus are indistinguishable. In contrast, our DL neural network considerably reduces the noise level and generates much clearer images. As a result, more details of the imaging structure, including the blur peaks, become distinguishable. The right-column plots show the profiles along the red lines in the Airy patterns. After denoising, the DL-enhanced results clearly display two and four more peaks in comparison with the original images. The middle column shows that the DL algorithm has significantly reduced the amplitude of noise in a signal-free area (e.g., pixel position in direction from 0 to 50). With the exposure time increasing (see gray bars in right column of Fig. 6 in Appendix C), the noise level and variance of the directly accumulated images approach those of the DL-enhanced results, respectively. This implies that the DL algorithm can remarkably suppress the shot noise within the same measurement time. In Fig. 3(b), we also plot the envelope of the theoretical Airy pattern (see also Appendix D). It can be seen that the envelope of the DL-enhanced result is better fitted by the theoretical envelope because the shot noise is greatly reduced.
![]()
Figure 3.Original and DL-enhanced Airy patterns for exposure time (a) Δte = 0.1 s and (b) 0.5 s, respectively; left column, top view of the original and DL-enhanced Airy patterns; middle column, projecting the Airy pattern to the y direction (side view); right column, brightness profiles along the red lines in the Airy pattern in left column. Red arrows are guides to the eye for the peaks appearing in the DL-enhanced images but indistinguishable in the original ones. Red curves in (b) represent the envelope of a theoretical Airy pattern.
Figure 4 characterizes the denoising performance of our DL algorithm by comparing the SNR between the original and the DL-enhanced images. Here, we use two definitions for SNR. Both are widely used for evaluating the performance of measurement[41]. The first type of SNR is defined as
![]()
Figure 4.SNRs for the direct accumulation and the DL-based scheme. (a) Original image showing the areas for calculating SNR. The red dot indicates the center of the main peak of the Airy pattern. The red box surrounds a pure noise area. (b) SNR(1) versus the exposure time Δte; (c) SNR(2) versus the regroup size m.
The improvement provided by the DL-based scheme can be further verified with the second type of SNR, defined as
5. Conclusion and Discussion
In summary, we have proposed and demonstrated a DL-based denoising scheme to achieve measurement sensitivity beyond the SQL with only a classical resource. The photon-number-dependent nonlinear feedback during training significantly suppresses the shot noise inherently existing in measurement. This work opens the door to achieve unprecedented precision in measurement. Meanwhile, the data postprocessing nature of our scheme makes it generally valid for various measurement systems. This DL-based denoising scheme is not limited to optical imaging but is also applicable to spectroscopy and various interferometers. It can even be extended to the microwave and acoustic-wave domains.
References
[29] J. Xie, L. Xu, E. Chen. Image denoising and inpainting with deep neural networks. Adv. Neural Inf. Process Syst., 25, 341(2012).
[36] O. Ronneberger, P. Fischer, T. Brox. U-net: convolutional networks for biomedical image segmentation. International Conference on Medical image computing and computer-assisted intervention, 234(2015).
[41] D. J. Schroeder. Astronomical Optics(1999).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20