
Yuansong Yang, Xi Wang, Mingjun Ren. Multilayer Perceptron-Based Fusion Method for Metal Surface Measurement Data by Multi-Sensors Incorporating Photometric Stereo and Structured Light[J]. Acta Optica Sinica, 2023, 43(19): 1912002
- Acta Optica Sinica
- Vol. 43, Issue 19, 1912002 (2023)
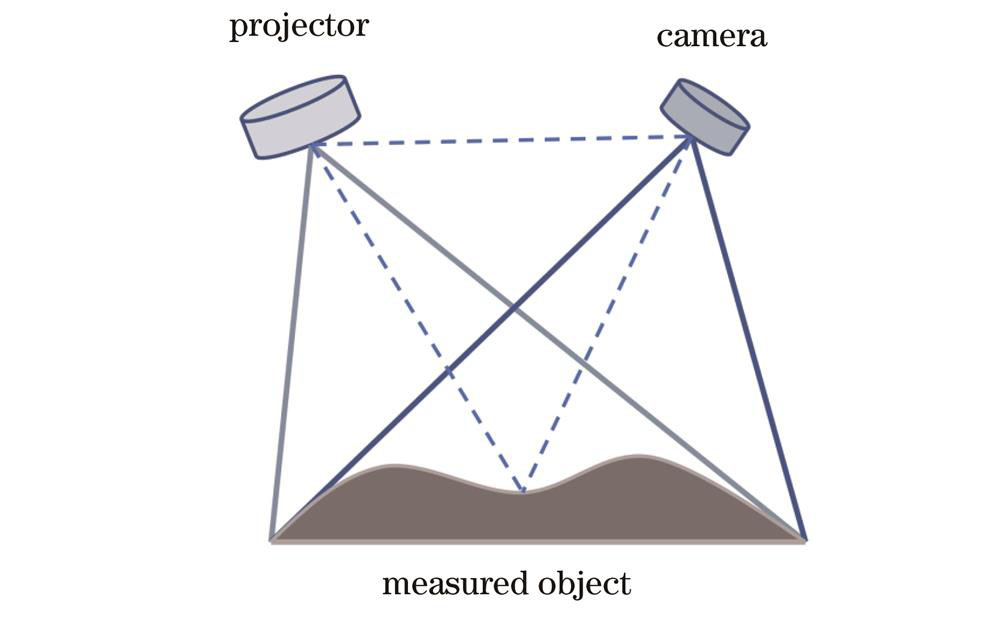
Fig. 1. Schematic of fringe projection system
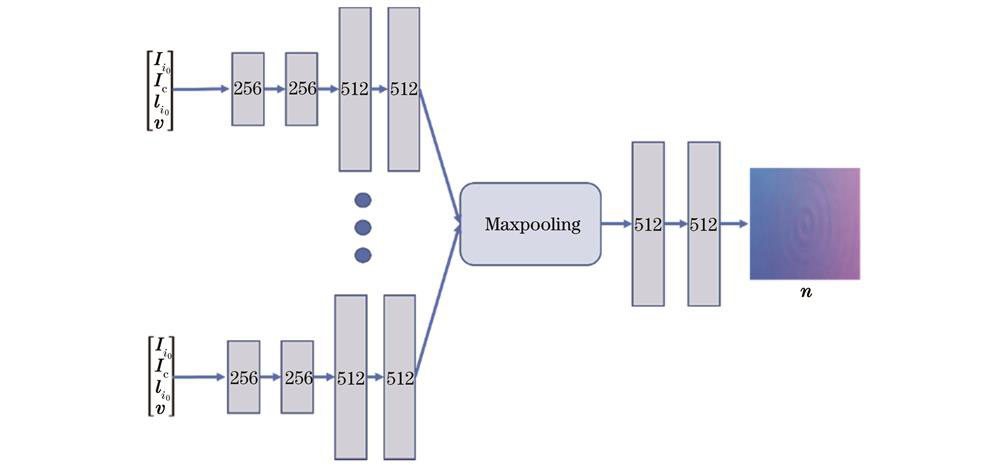
Fig. 2. Schematic of photometric stereo vision network
Fig. 3. Flowchart of multimodal data fusion
Fig. 4. Schematic of depth gradient
Fig. 5. Schematic of proposed network structure
Fig. 6. Schematic of network sampling policy
Fig. 7. Overall diagram of experiment equipment
Fig. 8. Simulation results. (a) Simulation normal image; (b) simulation depth image; (c) result of fusion algorithm; (d) result of normal integrity algorithm
Fig. 9. Mean error results along Z-axis of different algorithms. (a) (b) 3D distribution; (c) (d) 2D distribution
Fig. 10. Mean error results along Z-axis of different algorithms under different noise levels. (a) Fusion algorithm; (b) normal integrity algorithm
Fig. 11. Comparison of mean error along Z-axis by different noise level
Fig. 12. Experiment parts
Fig. 13. Normal vector results. (a) Result of part 1 by deep learning method; (b) result of part 1 by least square method; (c) result of part 2 by deep learning method; (d) result of part 2 by least square method
Fig. 14. Experimental results of part 1 and part 2. (a)(b) Structured light reconstruction results; (c)(d) fusion reconstruction results by least square normal vector; (e)(f) integration algorithm reconstruction results; (g)(h) reconstruction results by proposed method
Fig. 15. Error distribution results. (a) Structured light method result of part 1; (b) fusion algorithm result of part 1; (c) structured light method result of part 2; (d) fusion algorithm result of part 2
|
Table 1. Relationship between
|
Table 2. Comparison of mean error along Z-axis under different noise levels
|
Table 3. Repetitive measurement accuracy (RMS) of fusion point clouds
|
Table 4. RMS error of different methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20