
Yu Liu, Dongkai Dai, Liheng Ma, Sihua Fu, Xingshu Wang. A Star Sensor Calibration Method Based on Attitude Correlated Frame[J]. Acta Optica Sinica, 2017, 37(11): 1128003
- Acta Optica Sinica
- Vol. 37, Issue 11, 1128003 (2017)
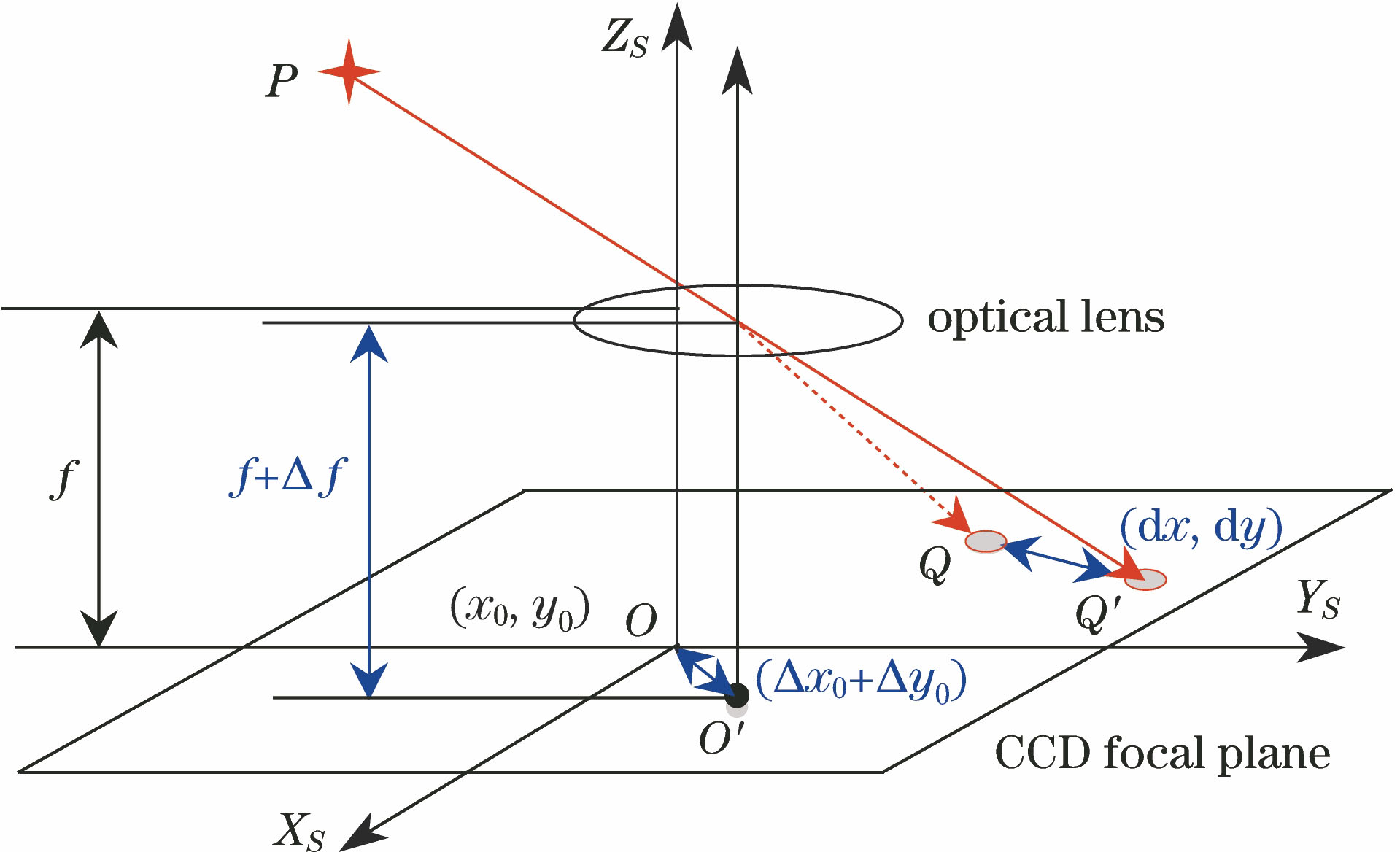
Fig. 1. Actual imaging model of star sensor
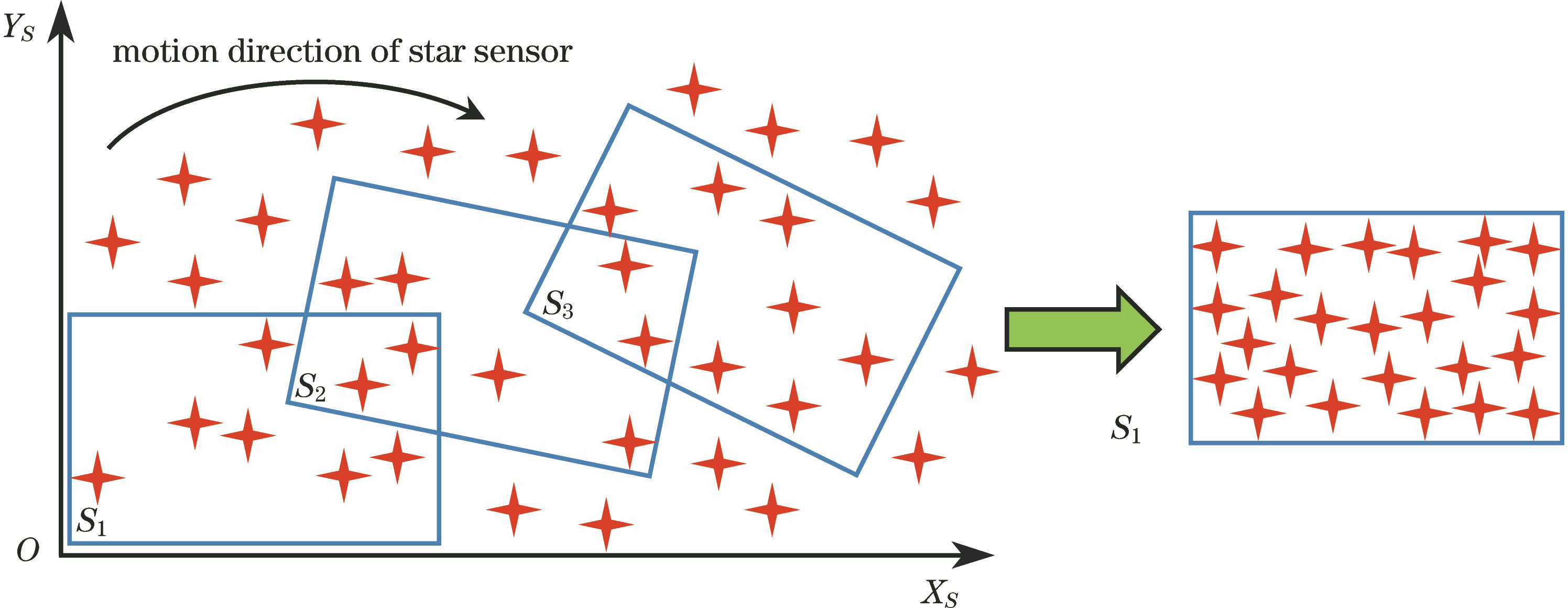
Fig. 2. Schematic of correlation among multi-frame star maps
Fig. 3. Reprojection errors with different star points noises under (a) constant zero bias and (b) random walk condition
Fig. 4. Distributions of reprojection errors. (a) Cartesian coordinate; (b) polar coordinate
Fig. 5. RMS errors of intrinsic parameters under different pixel noises of star points. (a) x0; (b) y0; (c) f; (d) maximum residual distortion
|
Table 1. Simulation parameters of gyro and star sensor
|
Table 2. Average calibration results from ACF calibration method

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20