
Xiong Cao, Zhaoxiang Lin, Shalei Song, Binhui Wang, Dong He, Zhongzheng Liu. Multispectral LiDAR Point Cloud Denoising Based on Color Clustering[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1228002
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1228002 (2021)
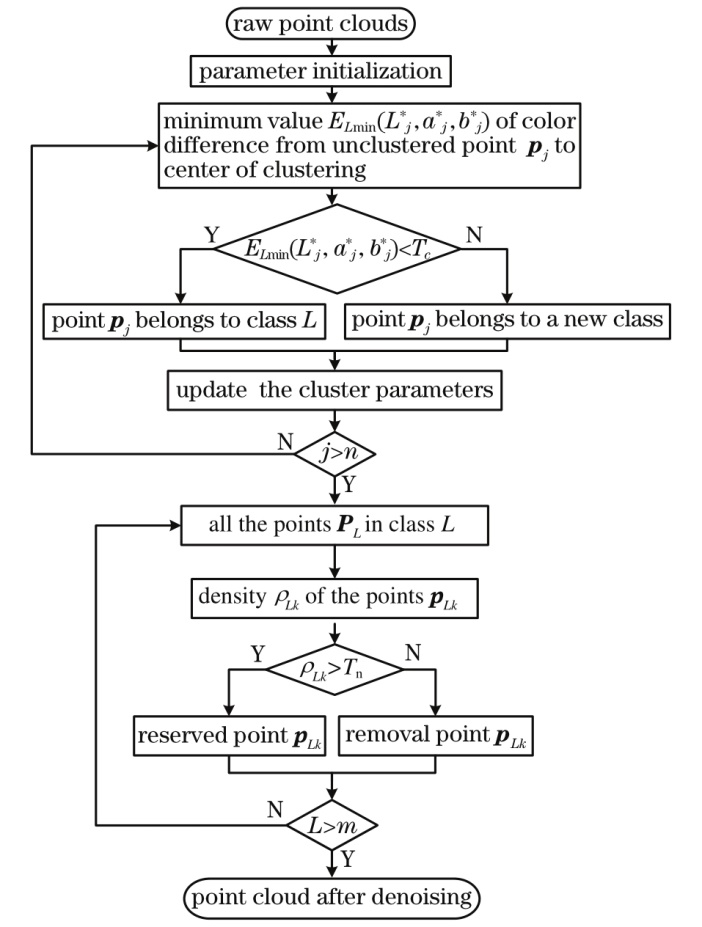
Fig. 1. Flow chart of algorithm
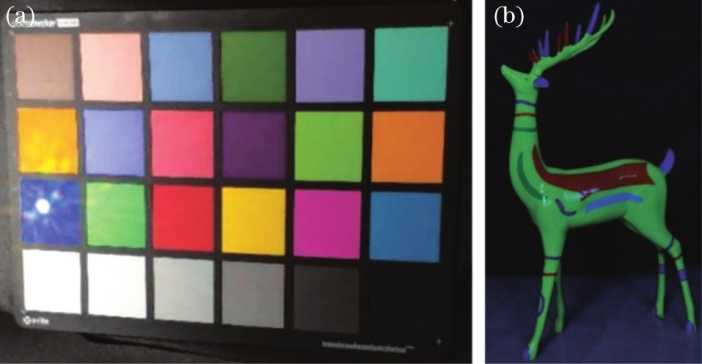
Fig. 2. Plane target and stereo target. (a) Standard color card; (b) colorful model of deer
Fig. 3. Denoising results of different algorithms. (a) Raw data; (b) denoising algorithm based on statistical filtering;(c) denoising algorithm based on monochromatic intensity clustering; (d) proposed method
Fig. 4. Original multispectral LiDAR point cloud
Fig. 5. Color clustering results. (a) First cluster obtained by color clustering of original point clouds; (b) second cluster obtained by color clustering of original point clouds; (c) third cluster obtained by color clustering of original point clouds; (d) fourth cluster obtained by color clustering of original point clouds; (e) fifth cluster obtained by color clustering of original point clouds; (f) sixth cluster obtained by color clustering of original point clouds
Fig. 6. Denoising result of each cluster. (a) Cluster 1; (b) cluster 2; (c) cluster 3; (d) cluster 4; (e) cluster 5
Fig. 7. Denoising results of different algorithms. (a) Denoising result of statistical filtering based algorithm; (b) denoising result of monochromatic intensity clustering based algorithm; (c) denoising result of proposed method
|
Table 1. Error statistics of three denoising methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20