
Yuxin Jiang, Jianfeng Sun, Peipei Hou, Ronglei Han, Weijie Ren, Haisheng Cong, Longkun Zhang, Chaoyang Li, Lingling Xu, Zhengwei Zhang. Correction of Pointing Deviation of Risley Prisms Based on Levenberg-Marquardt Algorithm[J]. Chinese Journal of Lasers, 2023, 50(6): 0605001
- Chinese Journal of Lasers
- Vol. 50, Issue 6, 0605001 (2023)
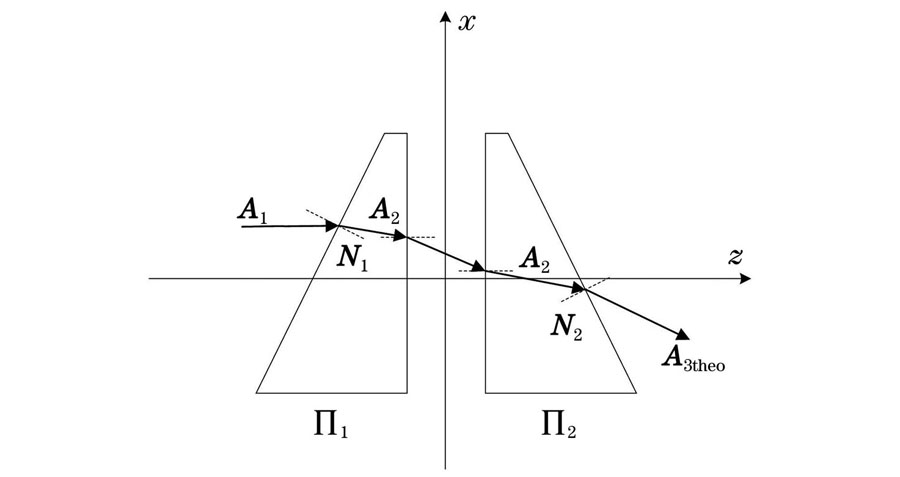
Fig. 1. Propagation process of light in rotating double prism system
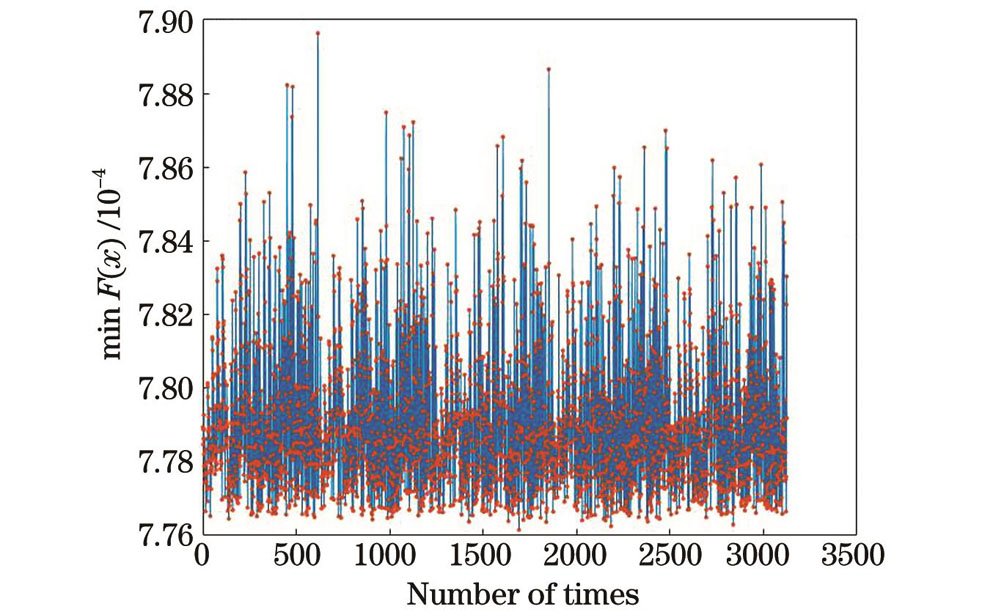
Fig. 2. Optimized minimum error evaluation function value in the case of different initial values
Fig. 3. Error correction experiment platform of Risley prisms. (a) Schematic; (b) physical map
Fig. 4. Theoretical points selected on light screen
Fig. 5. Deviation of theoretical and actual points before correction. (a) Deviation of theoretical and actual points on light screen; (b) deviation of theoretical and actual points in different positions
Fig. 6. Deviation of theoretical and actual points after overall correction. (a) Cost function of error varies with iterations; (b) deviation of theoretical and actual points on light screen; (c) deviation of theoretical and actual points in different positions
Fig. 7. Beam pointing deviation at different azimuth and pitch angles
Fig. 8. Deviation of theoretical and actual points after adding the correction for the error of initial incident beam relative to ideal optical axis. (a) Cost function of error varies with iterations; (b) deviation of theoretical and actual points on light screen; (c) deviation of theoretical and actual points in different positions
Fig. 9. Deviation of theoretical and actual points after individually correcting the points whose pitch angle is less than 15°. (a) Cost function of error varies with iterations; (b) deviation of theoretical and actual points on light screen; (c) deviation of theoretical and actual points in different positions
|
Table 1. Maximum pointing deviation caused by some error sources to different fields of view of rotating Risley prisms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20