
Yongjian Zhang, Lin Wang, Guo Wei, Chunfeng Gao, Hui Luo. Integrated navigation method of RLG INS/GNSS polar region[J]. Infrared and Laser Engineering, 2021, 50(S2): 20210066
- Infrared and Laser Engineering
- Vol. 50, Issue S2, 20210066 (2021)
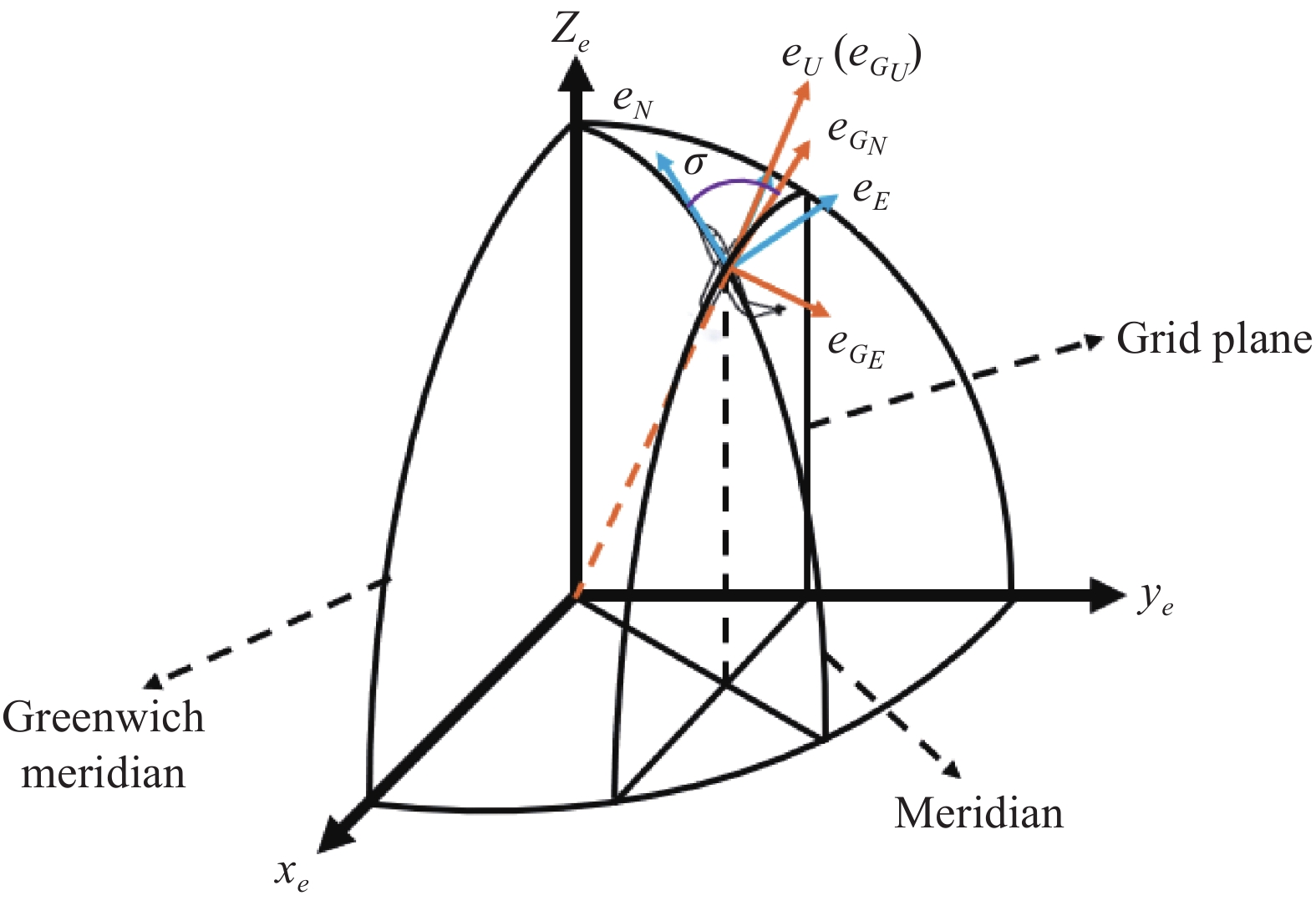
Fig. 1. Grid coordinate
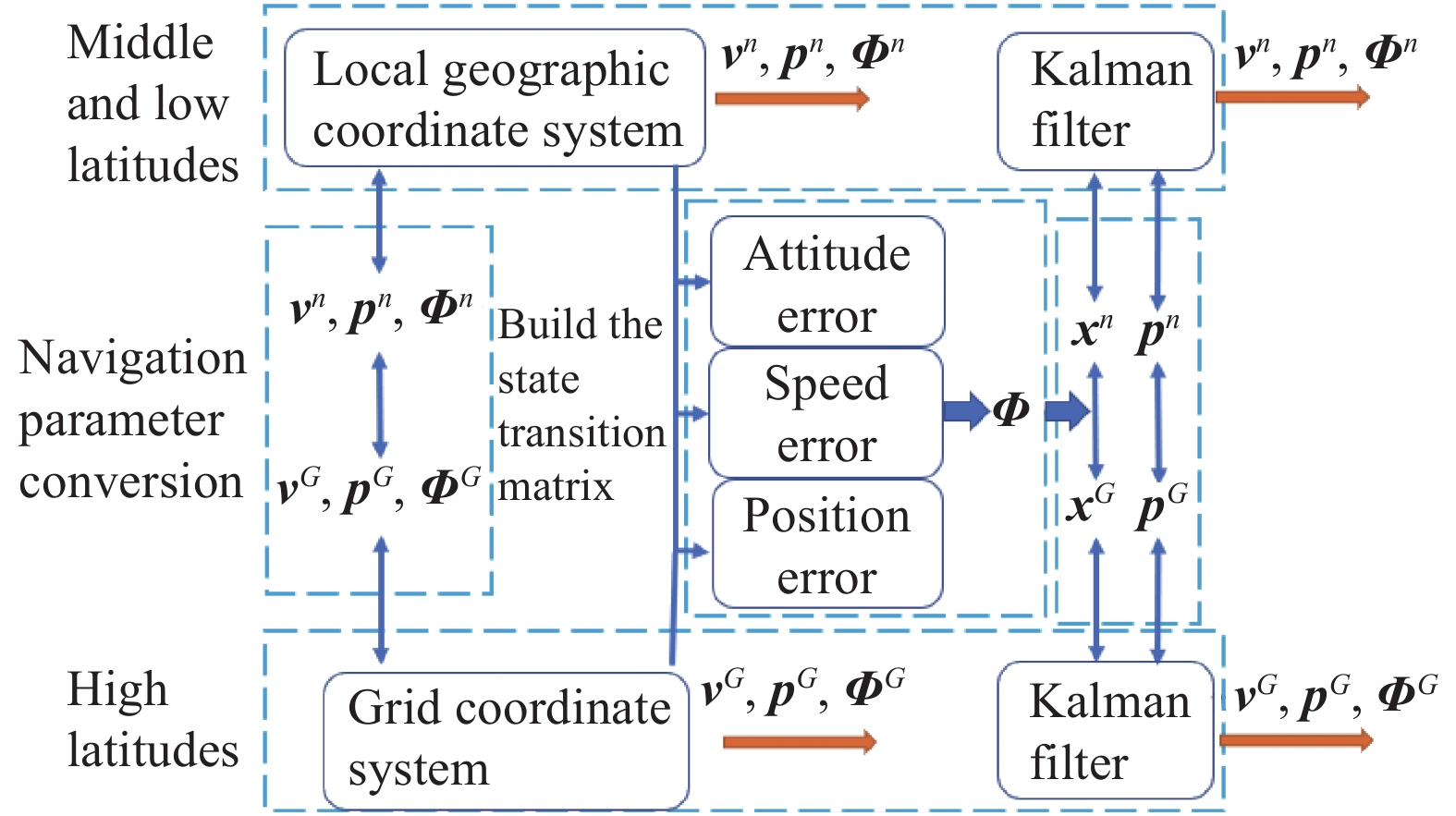
Fig. 2. Conversion diagram
Fig. 3. Relative attitude error
Fig. 4. Relative position error
Fig. 5. Relative estimation error of the gyro bias
Fig. 6. Relative estimation error of the accelerometer bias
Fig. 7. Relative attitude error in simulation experiment
Fig. 8. Relative position error in simulation experiment
Fig. 9. Relative estimation error of the gyro bias in simulation experiment
Fig. 10. Relative estimation error of the accelerometer bias in simulation experiment
|
Table 1. Peak value of state estimation error with covariance transformation
|
Table 2. Peak value of state estimation error without covariance transformation


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20