Using light to remotely and precisely manipulate objects, a concept generalized as optical manipulation, has gained strong momentum in various academic disciplines such as life sciences, quantum physics and micro-robotics, ever since its inception landmarked by the invention of optical tweezers by Arthur Ashkin, Steven Chu, and their coworkers at the Bell lab. Centering at exploiting momenta of photons and the associated optical force/torque, corresponding researches of optical manipulation have primarily dedicated to either improving the resolution of experimental apparatus to maneuver ever-smaller objects down to single atomic level, or sculpturing the wavefront of light beams to ever-more perplexing patterns to meet the demand of parallel, multi-mode and multi-functional manipulation of micro-nano objects.
Despite successful and diverse applications of optical force/torque, they are fundamentally limited by the smallness in magnitude bounded by the photons' dispersion relation, and hence, their operations cannot go beyond the fluid domain to solid surfaces, where the adhesion and friction forces come into play that render the effects of optical force/torque in vain. To resolve this difficulty, and also, in parallel to the trend of enriching the means of optical manipulation beyond the sole reliance on photon momenta, it is vital to search for new mechanisms that can supplement the use of optical force/torque in situations that favor low light intensity, reduced photon and thermal damage, fast and long-range transportation, etc. in the fluid environments, or more importantly, to enable the extension of optical manipulation from the fluid to solid domain, where solid-based devices, e.g., photonic and electronic chips/circuits await the possibility of remote and precise reassembly and reconfiguration likely to be achieved by light in the future.
Recently, a team of researchers led by Prof. Min Qiu at Westlake University was invited by Co-Editors-in-Chief, to contribute a comprehensive review paper entitled "Optical manipulation: from fluid to solid domains", which was published on the Volume 2, Issue 2 of Photonics Insights. (Qiannan Jia, Wei Lyu, Wei Yan, Weiwei Tang, Jinsheng Lu, Min Qiu. Optical manipulation: from fluid to solid domains[J]. Photonics Insights, 2023, 2(2): R05)
In this paper, apart from reviewing historically important and burgeoning topics in optical manipulation, they aim to unfold its challenges at the crossing of fluid and solid domains. Representative techniques covered in this paper are displayed in Fig. 1.
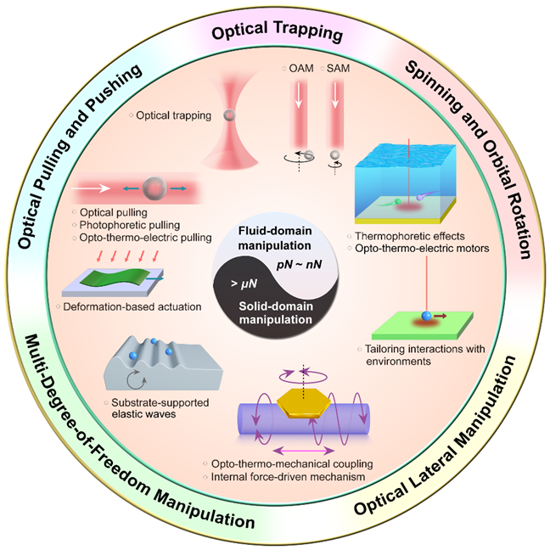
Fig. 1. Overview of optical manipulations in fluid and solid domains
Four hundred years ago, upon observing the deflection of comet tails away from the sun, German astronomer Johannes Kepler proposed the earliest concept of optical force: the solar "breeze". This very concept was later less phenomenologically, while more quantitatively attributed to the momentum of light by Maxwell's electromagnetic theory. Despite the existence of momentum in light waves and the possibility of harvesting it to exert force on objects, little success was made in this regard until the invention of lasers and the subsequent proposal of optical tweezers back in the 60s and 70s, respectively.
Optical tweezers, whose invention was awarded the Nobel prize in 2018, utilize one or two beams of strongly focused coherent light to immobilize tiny objects immersed in fluidic environments, which would otherwise move randomly due to Brownian motions. Nowadays, to meet the increasing demand of studying ever-smaller objects down to sub-wavelength dimensions, other than relying on high numerical-aperture objectives, optical tweezer platforms have been more frequently built upon plasmonic or dielectric resonant structures, where sub-wavelength sized particles can be trapped stably at the near field of resonators.
Specifically, "trapping" of stochastic objects occurs because of the exchange of light and mechanical momenta through reflection, refraction/diffraction, scattering and absorption processes with the use of Gaussian beams, spherically uniform particles, and isotropic fluid medium with small refractive indexes (compared to that of particles). Hence, more complex motion patterns can be unlocked by engineering the light beam profile via spiral phase plates, metasurfaces or spatial light modulators, the composition and uniformity of fluid surroundings, or alternatively, by selecting non-isotropic or non-spherical objects, e.g., Janus particles, chiral particles, etc., to manipulate.
Over the past few decades after the first demonstration of optical tweezers, a lot of efforts were made to explore the full parameter space of both the light source in terms of polarization and wavefront shaping, and of the target objects in terms of their composition and geometry. Thereupon, myriad manipulation modes on top of optical trapping have been reported, including spinning and rotation, arbitrary lateral motion enabled by engineering the phase gradient of light field in the transverse plane, optical pushing and the exotic optical pulling with the use of optical tractor beams, etc., as displayed in Fig. 2. Meanwhile, in quest of higher level of integration and manipulation versatility, a notable trend is to transfer the experimental apparatus based on free-form optics to planer structures or optical fibers.
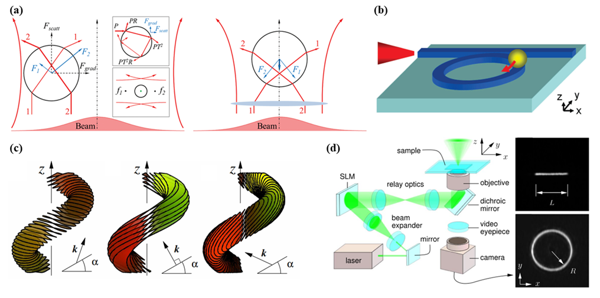
Fig. 2. Different locomotion modes induced by optical and mechanical momenta transfer in the fluid domain. (a) Schematic of optical trapping using focused Gaussian beam in the Mie regime and (b) in the near field of waveguides. (c) Example of optical tractor beams with tilted wavefronts to implement optical pulling. (d) Manipulation of particles in the lateral plane.
In the fluid domain, auxiliary effects induced by light can be employed to enable optical manipulation. Given that photons, with their travelling speed being extremely large, are adequate energy carriers but intrinsically poor momentum carriers, accessing the energy channel of light is promisingly more efficient than merely utilizing the light momentum. Heat, or to be more precise, light-thermal effects are indispensable elements in optical manipulation that relies on the energy of light. With the presence of temperature gradient, fluid surroundings of the target object become convective, the motion of which can be programmed by patterning the temperature profile through light beam shaping or sculpturing of absorptive substrates.
Correspondingly, the target object can be set in motion as a result of the programmed flow field. Heat-mediated forces arising from opto-thermo-hydrodynamic coupling are rich in variety, including thermophoretic force, dielectrophoretic force, opto-thermo-electric force and opto-thermo-osmotic force, etc., all of which can be harvested to construct trapping or multi-mode actuation, depending on the concrete temperature profile, the structure of the target object, physical and chemical properties of the fluid and the particle-fluid interface (Fig. 3).
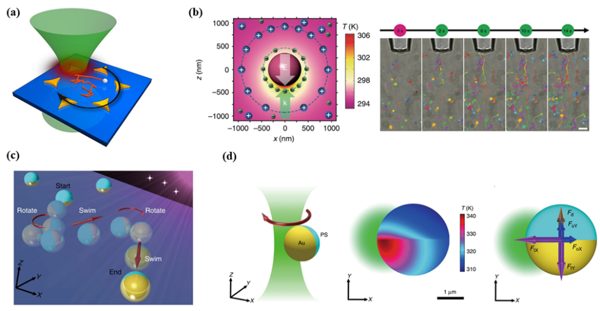
Fig. 3. Different locomotion modes induced by heat-mediated effects in the fluid domain. (a) Thermophoretic trapping. (b) Opto-thermo-electric pulling. (c) Multi-mode self-propelled motion and (d) rotation of Janus particles with the synergism of optical force, opto-thermo-electric force and viscous drag.
Through indirect heat-mediated routes, manipulation of micro-nano objects no longer requires tight focus and the associated high local light intensity. Instead, robust particle trapping and steering can be realized with light power 2-3 orders of magnitude lower than that demanded in conventional optical tweezers. Apart from light intensity, requirements of implementing effective optical manipulation are relaxed on other fronts. For instance, fast and long-range transportation, stable trapping of low-index or even negative-index particles are made possible, thanks to the supplement of heat-mediated techniques in situations where optical force proves to be impotent.
Fluid domain has always been the golden test ground for optical manipulation, whereas little success was achieved in the solid domain. Two major challenges come along with the change of working environment: (1) compared to the viscous drag in fluids, the resisting force on solid surfaces, namely, the adhesion and friction forces, significantly overwhelms the optical force by several orders of magnitude; (2) no auxiliary forces originating from the fluid flow are accessible in the solid domain, where target objects are in direct contact with solid substrates.
Pulsed optical force, that is, more specifically, optical force generated from pulsed light, is a direct extension of conventional optical force and inherits the same mechanism of momentum transfer. Benefiting from its peak value significantly greater than its average, and also the immediacy of optical-mechanical momenta transfer, pulsed optical force has been exploited to detach adhered particles from nonabsorptive substrates. Other than the use of pulsed optical force, however, replication and emulation cannot reproduce similar successes for optical manipulation in the solid domain, and new mechanisms need to be explored.
In view of this challenge, the research team led by Prof. Min Qiu at Westlake University put forward a solution, which relies on light-induced elastic waves to mobilize adhered substances. Specifically, upon irradiance of pulsed light, absorptive objects, e.g., metallic micro-plates, will experience impulsive thermal expansion and contraction in the form of elastic waves, during which the dynamic interaction between the thermal stress and friction force is the key enabler for the locomotion of the actuator. At the impulsive heating edge, the thermally-induced elastic wave should exactly offset the countering elastic waves induced by the maximum static friction before the actuation is initiated, indicating the existence of a peak power threshold.
In contrast, during the cooling period, the thermally-induced elastic waves tend to neutralize its deformation, which is nevertheless preserved by the friction force that counterintuitively acts as a facilitator of actuation. To better interpret this process by relating it to people's daily activities, the thermally-induced elastic waves can be seen as functioning as the inner force, while the friction force plays the role of the external force, thus, the synergism of the two bears resemblance to people walking, in which the friction force is indispensable. On top of this mechanism, the directionality of actuation is determined by the bias in form of asymmetries, e.g., the absorption asymmetry, contact asymmetry, geometric asymmetry, etc., which correspond to various locomotion modes exemplified in a plate-microfiber system, as shown in Fig. 4.
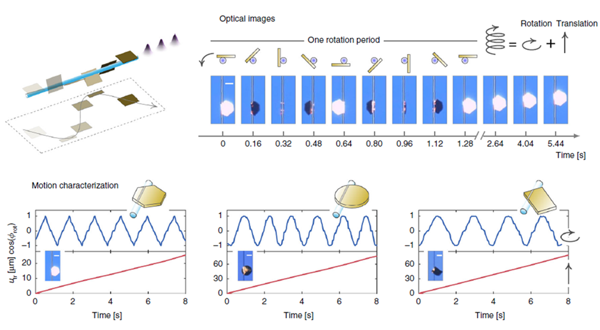
Fig. 4. Light-induced elastic wave actuation exemplified in a plate-fiber system.
At larger scales in the millimeter regime or beyond, similar actuation mechanisms can be reproduced using the modulated continuous-wave light, which is sufficient in generating substantial deformations in polymeric, liquid crystal, phase transition materials in quasi-static states, without referring to the excitation of elastic waves. More complex and robotic-like motions can be realized by patterned illumination, constructing machinery structures in actuators, the most common one being the dual-layer structure.
By exciting elastic waves in absorptive substrates, adhered particulates are endowed with transient and high-peak-valued acceleration as a result of the acoustic radiation force. Though extensively adopted in the establishment of acoustic tweezers with the use of piezoelectric substrates, the triggering signals are typically electric. Photonic excitement of elastic waves requires pulsed light illumination and absorptive substrates, the resultant elastic waves possess wide frequency spectrums and thus are hard to pattern or modulate, whereas it has been demonstrated to use pulsed light to detach adhered particles for pulsed laser cleaning, a technique adopted in semiconductor industries.
Still by accessing the energy channel of light, solid-to-liquid phase transition induced by light-thermal effects can be utilized to bypass the adhesion and friction forces, in the scheme of which fluidity is temporarily imposed on the object-substrate system during the heating cycle, so that optical force is no longer eclipsed and can have an impact in driving objects to move. Moreover, heat-mediated effects, such as thin-film dewetting, thermocapillary convection, pressure surge at the ablated fronts, etc., can come in handy and enable mass transfer with the presence of temperature gradient. Consequently, optothermally-gated photon nudging, directed self-assembly of particles, inter-substrate transfer of nanopatterned particles, etc., can be realized on solid surfaces or embedded in solid matrixes (Fig. 5).
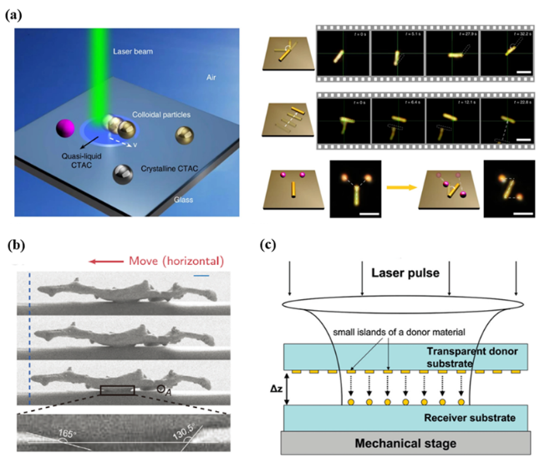
Fig. 5. Different mechanisms in enabling solid-domain optical manipulation. (a) Optothermally-gated photon nudging. The substrate experiences solid-to-liquid phase transition upon heating. (b) Locomotion of micro-plates driven by light-induced Marangoni effects. (c) Light-induced inter-substrate transfer of nanopatterned particles.
In summary, this paper provides an overview of advances in the field of optical manipulation from a unique perspective, which is to compare its implementation in the fluid and solid domains. Last few decades have witnessed thriving developments of optical manipulation, benefiting academic researches across myriad disciplines, especially in biology and quantum physics, owing to which Nobel prizes have been awarded to pioneers dedicated in the respective fields, i.e., Arthur Ashkin and Steven Chu.
In the future, efforts should be continued to push the boundary of optical manipulation to explore its full potential. Specifically, the authors envision that, a lot is to be found in the march of optical manipulation from the fluid to solid domain, given that the latter hosts a broad horizon involving on-chip electronic and photonic devices, the intersection between which and optical manipulation is bound to spark new brilliant technologies.