


- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0901001 (2019)

- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0901002 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0902001 (2019)

- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0904001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0905001 (2019)

- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0906001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0906002 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0906003 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0906004 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0906005 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0906006 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0906007 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0906008 (2019)
ing at the problems of optical alignment in optical transform watermarking algorithm and the security of optical cryptosystem, an optical watermarking method based on hyper-chaotic mapping and Gyrator transform is proposed. The hyper-chaotic phase mask is constructed by using the Chen 4D hyper-chaotic system, and then the vortex light constructed by the Fresnel zone plate and the radial Hilbert mask is used to illuminate the hyper-chaotic phase plate. Finally, the encrypted watermarking image is embedded into the host gray image by means of Gyrator transform to realize optical information hiding in the Gyrator domain. The Gyrator inverse transform is used to extract the watermark information embedded in the target image. The experimental results show that the algorithm can extract high-quality watermarking information from highly imperceptible target images. The encrypted target image has a high signal-to-noise ratio and strong correlation with the host image. It can effectively resist salt and pepper noise and Gauss noise attacks with intensity coefficients of 0.06 and 0.8 respectively, and has good robustness against attacks with less than 50% occlusion rate and 80 compression factor. The encrypted target image has a similar statistical distribution compared with the original host image, which realizes information hiding well.
.- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0907001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0910001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0911001 (2019)
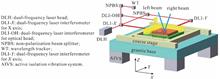
ing at systematic error sources in a Mueller matrix imaging polarimeter, we propose a simplified analytical method based on the approximate matching of the ideal coefficients of Fourier series of the intensity curve with the real ones. By using the method, a linear relationship between the deviation of the Mueller matrix and the parameter of the error source is built. The analytical expression for random error caused by the azimuthal angle is complex, so an equivalent noise model is proposed to characterize the impact of misalignment from the view of statistics. Based on the simplified models above, we conduct a comprehensive analysis for the measured Mueller matrices influenced by six kinds of systematic error sources and two kinds of random error sources. The simulation for the measurement of a typical Mueller pupil of the lithographic projector is performed. The results verify the accuracy of the proposed method.
.- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0911002 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0911003 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0912001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0912002 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0912003 (2019)
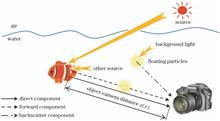
ing at the large measurement error and low accuracy problems caused by refraction when conducting underwater measurement based on non-parallel stereovision system, a measurement model of underwater stereovision system is built via refraction light path. Given the relative position relationship between two cameras, a parameter calibration method which is suitable for the measurement model is improved based on Agrawal's algorithm. To verify the feasibility and robustness of the improved method, the underwater calibration experiments are carried out. Experimental results show that, for the parameter of normal vector of waterproof cover, the results of the improved method are closer to the actual results than that of Agrawal's algorithm. The measurement model of underwater stereovision system calibrated in this paper is applied to measure the standard length between the calibration points on the underwater target. The average measurement error is -0.0134 mm, and the maximum error is 0.2073 mm, which is equivalent to the measurement accuracy of stereovision system in air.
.- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0912004 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0912005 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0912006 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0914001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0914002 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0915001 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0915002 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0915003 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0915004 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0915005 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0915006 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0916001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0917001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0917002 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0922001 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0920001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0928001 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0928002 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0928003 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0928004 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0930002 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0930003 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0930004 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0930005 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0930006 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0930007 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0930008 (2019)
- Publication Date: Sep. 06, 2019
- Vol. 39, Issue 9, 0933001 (2019)
- Publication Date: Sep. 07, 2019
- Vol. 39, Issue 9, 0934001 (2019)
