
Guoqing Ma, Li Liu, Zhenglin Yu, Guohua Cao, Qiang Wang. Point-Cloud Splicing Technology for Large-Scale Surface Topography Measurement System[J]. Chinese Journal of Lasers, 2019, 46(5): 0504001
- Chinese Journal of Lasers
- Vol. 46, Issue 5, 0504001 (2019)
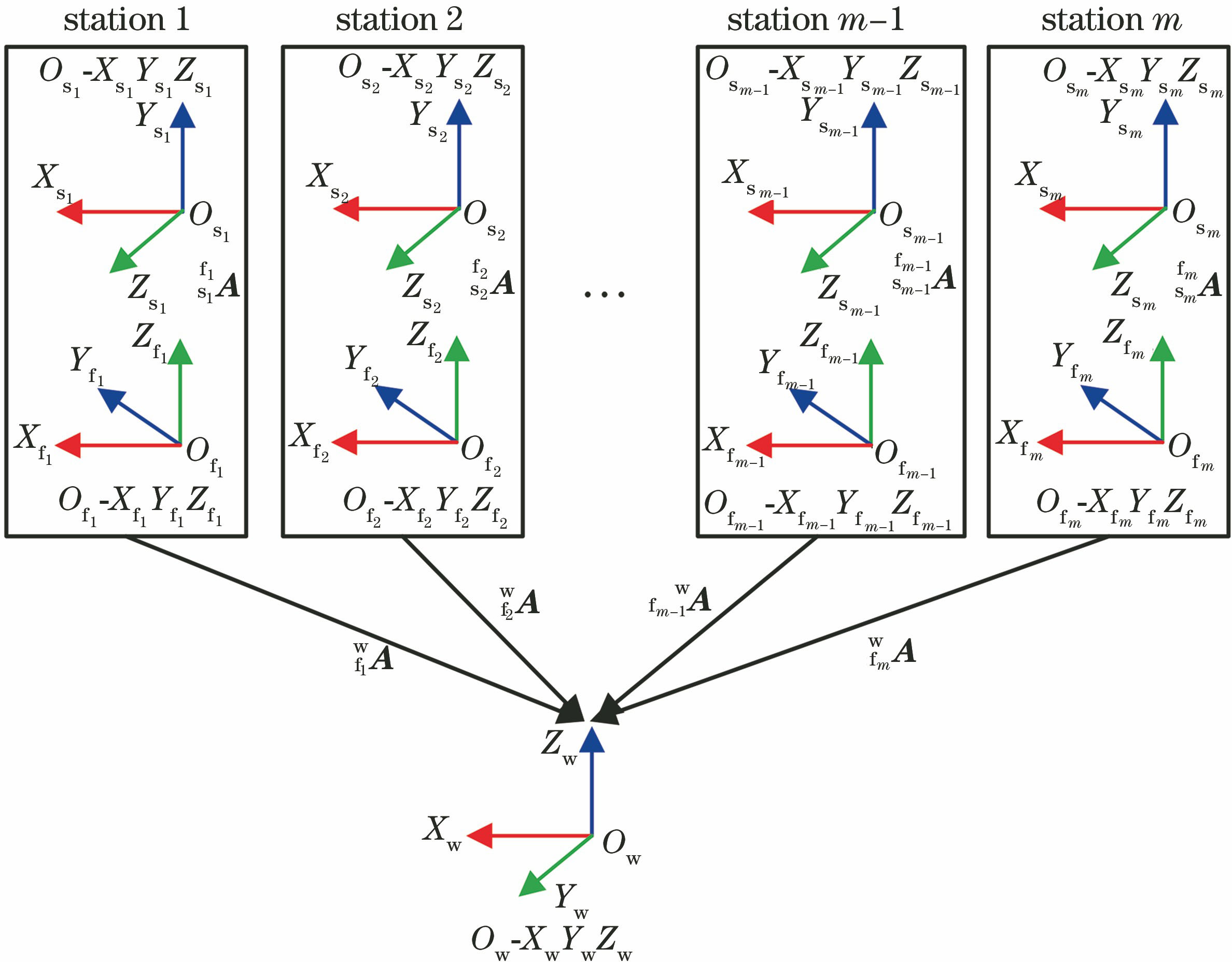
Fig. 1. Point-cloud splicing model based on iGPS world coordinate system
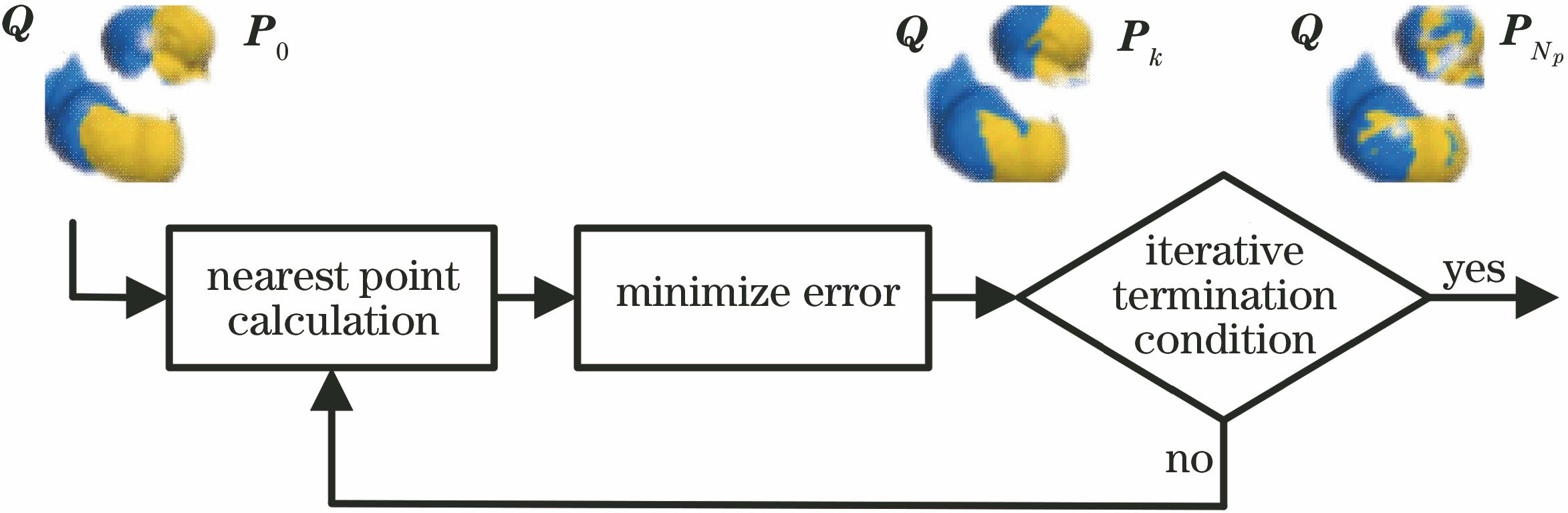
Fig. 2. Flow chart of ICP algorithm
Fig. 3. 3D schematic of particle optimization
Fig. 4. Updating map of particle position
Fig. 5. Main flow chart of PSO-ICP algorithm
Fig. 6. Point-cloud splicing effect by PSO-ICP algorithm. (a) Point cloud coarse registration; (b) point cloud fine matching
|
Table 1. Center coordinate of sphere after reconstruction
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Positional deviation of test points

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20