
Chen LI, Hao LI, Yanwei YANG. Wood Inertial Measurement Unit Based on Laser-induced Graphene[J]. Acta Photonica Sinica, 2024, 53(2): 0212005
- Acta Photonica Sinica
- Vol. 53, Issue 2, 0212005 (2024)
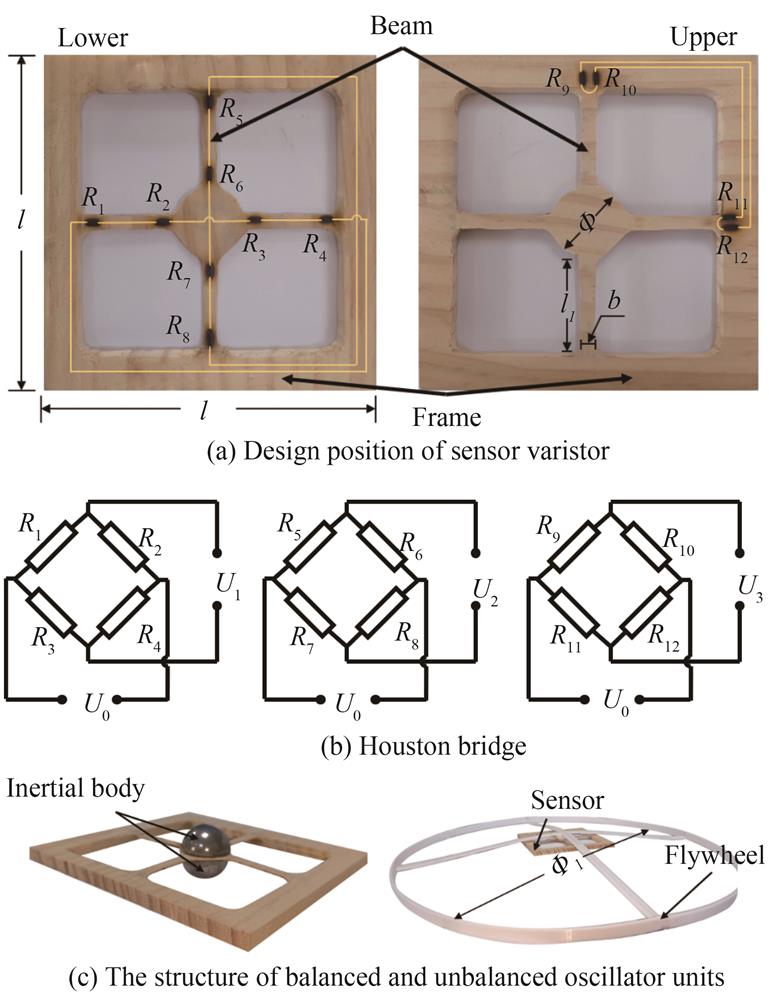
Fig. 1. The structure design of IMU
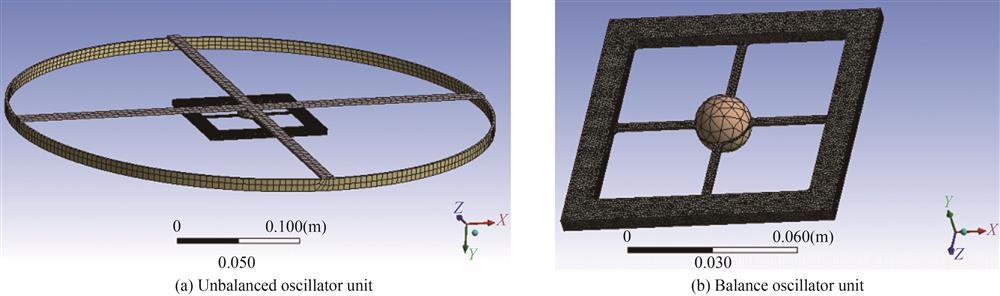
Fig. 2. IMU modeling and meshing
Fig. 3. Strain simulation diagram of IMU
Fig. 4. Experimental platform
Fig. 5. Unbalanced oscillator and commercial units rotate around Z-axis to collect acceleration signals
Fig. 6. The unbalance oscillator unit rotates around the X-axis(α=2.94 rad/s2)output voltage signal
Fig. 7. Comparison of test and simulation results
Fig. 8. Test results of IMU under periodic load
|
Table 1. Material attribute
|
Table 2. The structural dimensions of IMU
|
Table 3. Performance comparison between commercial low precision IMUs and proposed IMU

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20