
Liang Yang, Ning Zhang. Measurement System Design of Spatial Position Accuracy of Dynamic Targets[J]. Chinese Journal of Lasers, 2021, 48(13): 1304001
- Chinese Journal of Lasers
- Vol. 48, Issue 13, 1304001 (2021)
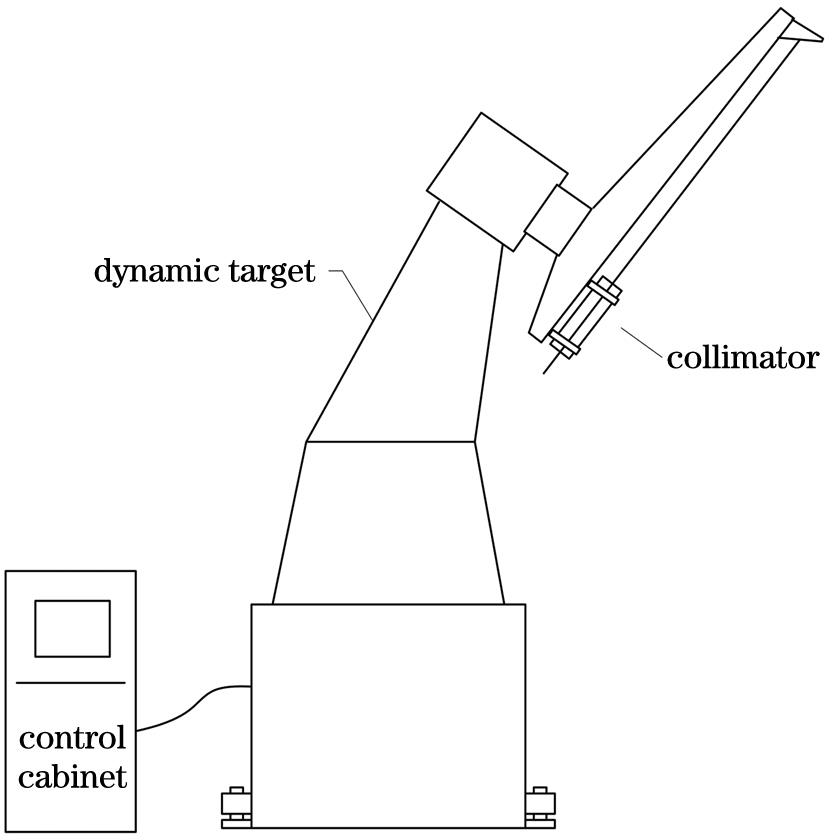
Fig. 1. Schematic of dynamic target
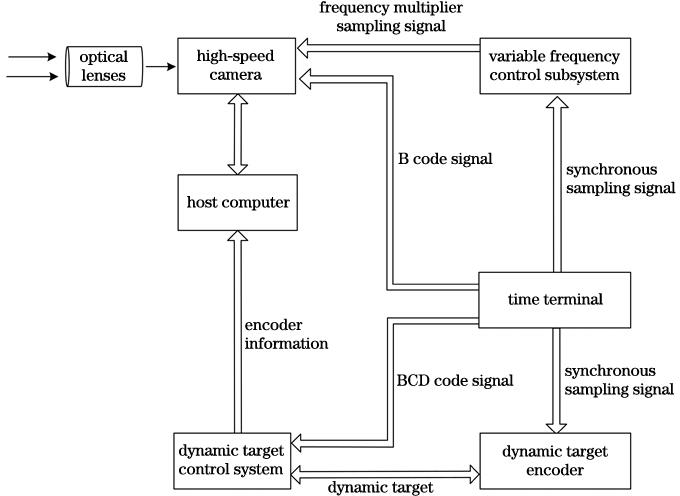
Fig. 2. Structural diagram of measurement platform
Fig. 3. Schematic of measurement system
Fig. 4. Target motion trajectory
Fig. 5. Corresponding relation between θ and ΔA
Fig. 6. Corresponding relation between θ and ΔE
Fig. 7. Space motion coordinates of dynamic target
Fig. 8. Relationship between image plane coordinates and dynamic target coordinates
Fig. 9. Schematic of image plane rotation
Fig. 10. Static reference point trajectory at medium speed
Fig. 11. Image surface offset trajectory of static reference point at medium speed
Fig. 12. Dynamic motion trajectory at medium speed
Fig. 13. Corresponding relation between horizontal offset and coder angle
Fig. 14. Corresponding relation between vertical offset and coder angle
|
Table 1. Dynamic accuracy

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20