
Jiaming Lin, Zihao Du, Chuying Yu, Wenmin Ge, Weichao Lü, Huan Deng, Chao Zhang, Xiao Chen, Zejun Zhang, Jing Xu. Machine-vision-based acquisition, pointing, and tracking system for underwater wireless optical communications[J]. Chinese Optics Letters, 2021, 19(5): 050604
- Chinese Optics Letters
- Vol. 19, Issue 5, 050604 (2021)
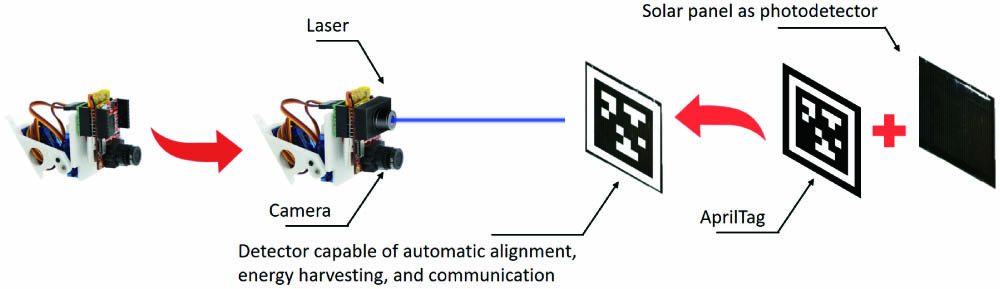
Fig. 1. Structure diagram showing an example of how to combine the existing UWOC system with the proposed APT system.
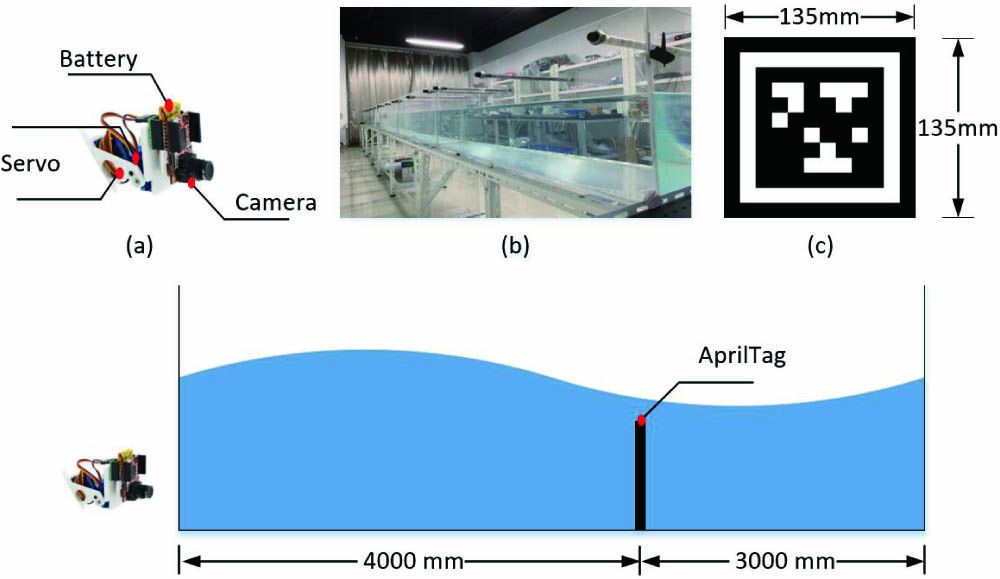
Fig. 2. Experimental setup of the proposed APT system for UWOC. Insets: (a) the camera with servos, (b) the water tank, and (c) the AprilTag36H11-2.
Fig. 3. Influence of different factors on the pointing time showing (a) the pointing time of the proposed APT system measured in the underwater channel at different distances and (b) the pointing time of the proposed APT system measured in the underwater channel at different illuminations.
Fig. 4. Schematic diagram of roll angle, yaw angle, and pitch angle.
Fig. 5. Pointing time of the proposed APT system measured in the underwater channel at different roll angles.
Fig. 6. Pointing time of the proposed APT system measured in the underwater channel (a) for different yaw angles and (b) for different pitch angles.
Fig. 7. Pointing time of the proposed APT system measured in the underwater channel with different scintillations.
Fig. 8. Influence of different factors on the tracking/acquisition time showing (a) the tracking time of the proposed APT system measured in a 5 m air channel at different speeds and (b) the acquisition time of the proposed APT system measured in a 3 m air channel at different angles.
Fig. 9. (a) A schematic diagram of the APT system acquiring a target and (b) the experimental setup for the acquisition time measurement at different deviation angles (α). The yellow area is the camera’s field of view, and the green line is the optical axis of the APT system.
Fig. 10. Experimental setup for proof-of-concept experiments for the proposed APT system integrated into a UWOC system.
Fig. 11. (a) Eye diagrams of the integrated system using NRZ-OOK modulation after acquiring the target through a 285 mm water channel, and (b) the pointing time of the proposed APT system measured in the underwater channel with different magnesium hydroxide powder concentrations.
Fig. 12. Eye diagrams of the integrated system using NRZ-OOK modulation during tracking the target through a 285 mm air channel.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20