
Raobo LI, Xiping YUAN, Shu GAN, Rui BI, Sha GAO, Lin HU. Research on Point Cloud Registration Method Using Gravity Feature Transformation[J]. Acta Photonica Sinica, 2021, 50(11): 1112002
- Acta Photonica Sinica
- Vol. 50, Issue 11, 1112002 (2021)
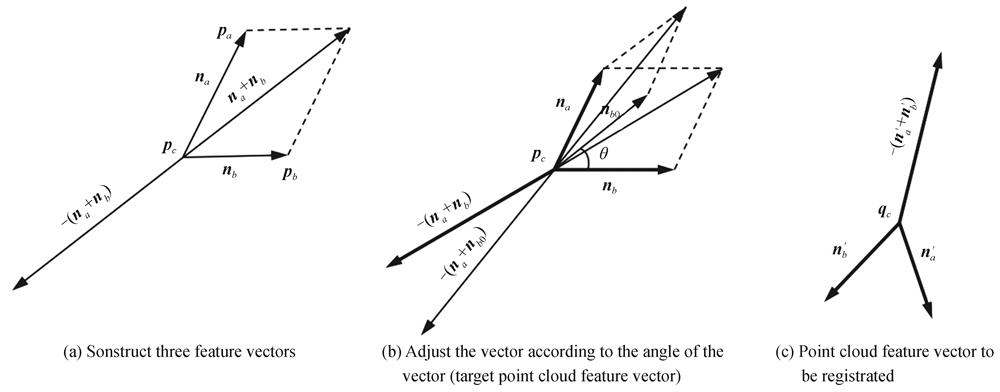
Fig. 1. The formation of three eigenvectors
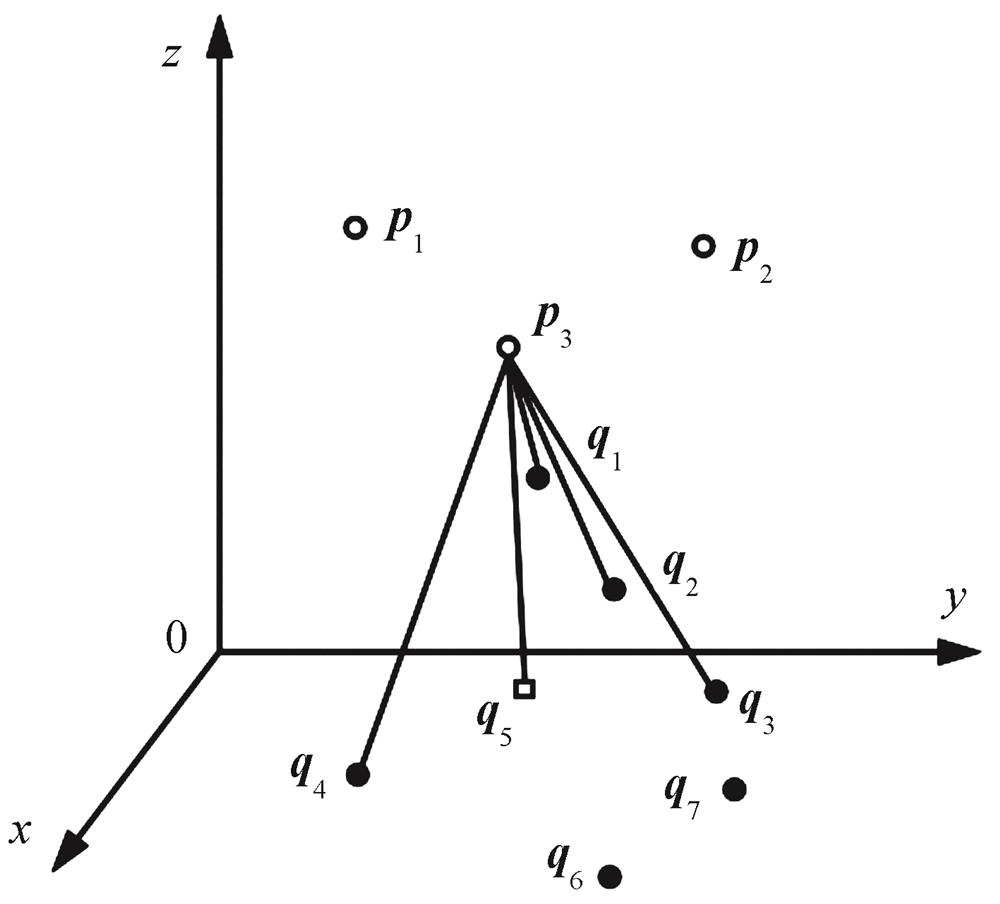
Fig. 2. Schematic diagram of the nearest point constructed by the mean value of coordinate points
Fig. 3. Rotation does not change the relative distance between the points and the angle of the vector
Fig. 4. Registration results of Bunny
Fig. 5. Registration results of Horse
Fig. 6. Two sets of physical maps
Fig. 7. Registration results of Tea caddy
Fig. 8. Registration results of Cup
| ||||||||||||||||||||||||||||||||||
Table 1. Comparison of classic point cloud data registration
| ||||||||||||||||||||||||||||||||||
Table 2. Comparison of registration of measured point cloud data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20