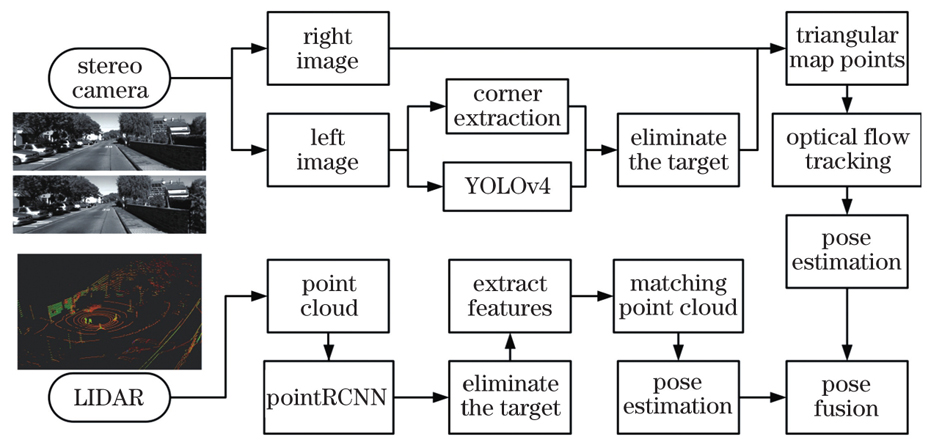
This paper presents a robot pose estimation algorithm that is based on the fusion of dynamic feature elimination images and point clouds. The method of deep learning is used to extract the candidate frame of the target object from an image and point cloud, which is then used for data processing and feature optimization. It completely avoids the error function abnormality caused by incorrect matching of dynamic features and eliminates its effect on the pose estimation. Simultaneously, this paper performs a dynamic weighted fusion of the pose based on the number of feature points. Finally, this paper uses the public KITTI data set and the experimental data collected by the experimental platform construct-in dynamic scenarios to compare the pose estimation accuracy of the three mainstream algorithms of BA, LOAM, and ORBSLAM2. Experiments show that removing dynamic features improves the accuracy of pose estimation to varying degrees. The posture result after fusion is more stable. Furthermore, the sequential processing logic ensures that the system is unaffected by the running time in the offline state to correctly process each frame of data.

Lei Zhang, Xiaobin Xu, Chenfei Cao, Jia He, Yngying Ran, Zhiying Tan, Minzhou Luo. Robot Pose Estimation Method Based on Image and Point Cloud Fusion with Dynamic Feature Elimination[J]. Chinese Journal of Lasers, 2022, 49(6): 0610001
