
Xin-chun LI, Zhen-yu YAN, Sen LIN, Di JIA. Point Cloud Registration Based on Neighborhood Characteristic Point Extraction and Matching[J]. Acta Photonica Sinica, 2020, 49(4): 0415001
- Acta Photonica Sinica
- Vol. 49, Issue 4, 0415001 (2020)
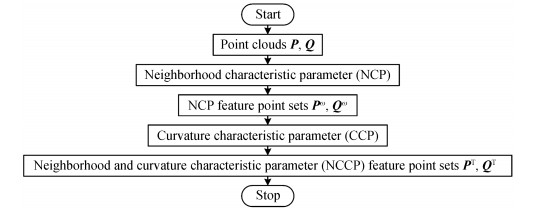
Fig. 1. Feature points extraction process
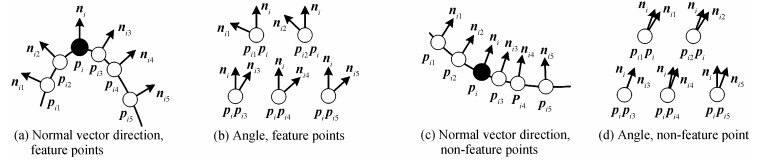
Fig. 2. Normal vector direction and angle between feature point and non-feature point and neighborhood points respectively
Fig. 3. Feature area and non-feature area
Fig. 4. Initial matching process
Fig. 5. Influence of threshold on initial registration error
Fig. 6. Influence of feature parameters on initial registration error
Fig. 7. Registration of Bunny model
Fig. 8. Registration of Dragon model
Fig. 9. Accurate registration effect of Bottle model
| |||||||||||||||||||||||||||||||||||
Table 1. Registration error of Bunny model
| |||||||||||||||||||||||||||||||||||
Table 2. Registration times of Bunny model
| |||||||||||||||||||||||||||||
Table 3. Registration error of Dragon model
| |||||||||||||||||||||||||||||
Table 4. Registration times of Dragon model
|
Table 5. Registration error and times of Bottle model

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20