
Gu Jiawei, Xie Xiaopeng, Cao Yibo, Liu Haoxin. A Semi-Dense Depth Map Acquisition Algorithm Based on Laser Speckle[J]. Chinese Journal of Lasers, 2020, 47(3): 304004
- Chinese Journal of Lasers
- Vol. 47, Issue 3, 304004 (2020)
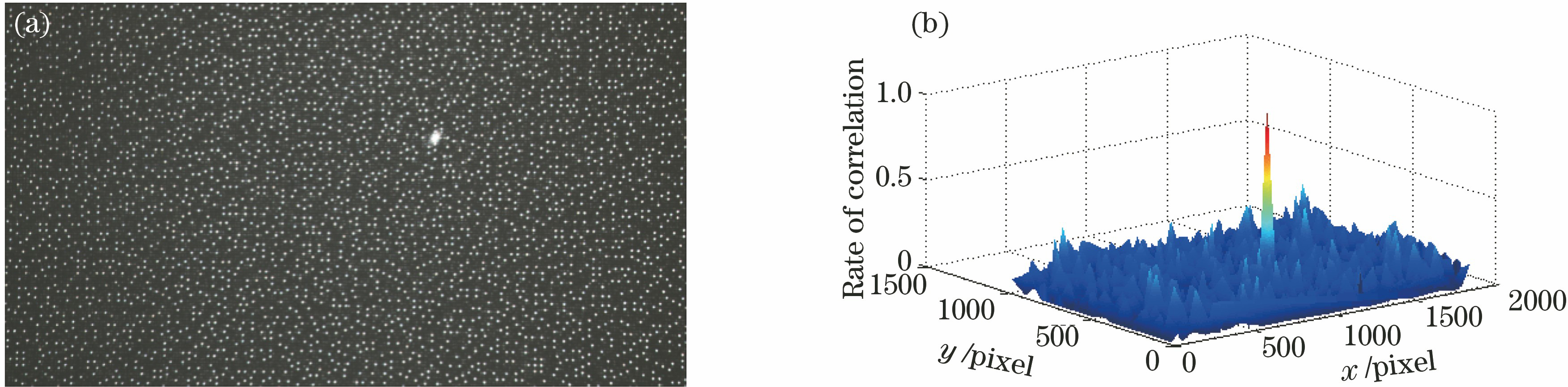
Fig. 1. Speckle correlation. (a) Speckle image; (b) correlation between single speckle and total speckles
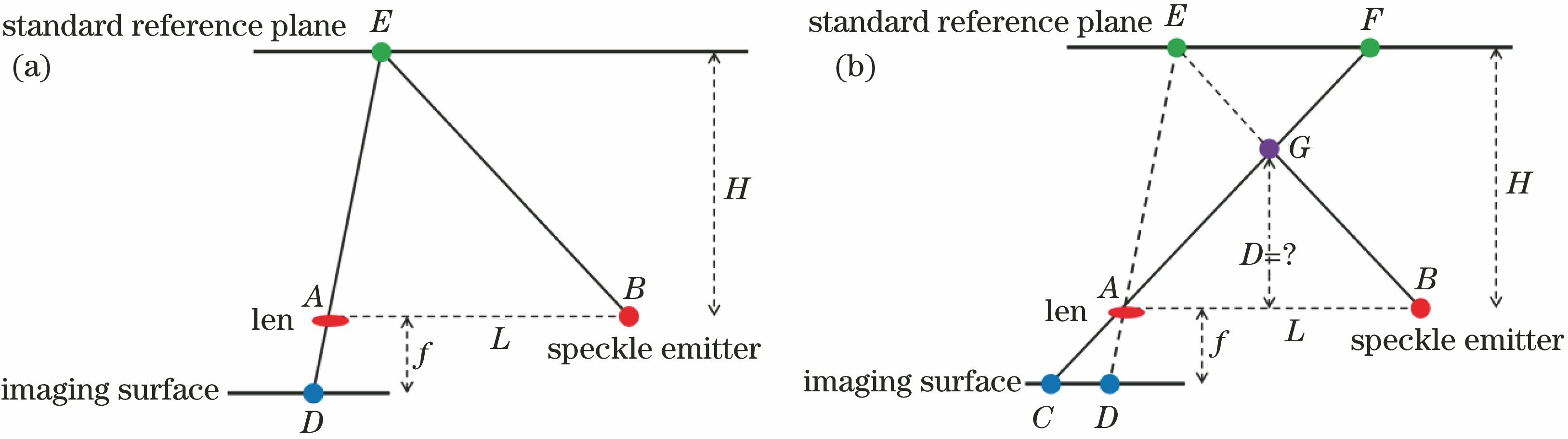
Fig. 2. Schematics of speckle ranging principle. (a) When there is no occlusion in space; (b) occlusion object appears in space
Fig. 3. Schematic of speckle ranging principle when the measured object (G) is outside the standard reference plane
Fig. 4. Depth measurement algorithm overall flow
Fig. 5. Images obtained with different binarization methods. (a) Absolute threshold binarization; (b) local adaptive binarization
Fig. 6. Speckle center pixel before and after extraction. (a) Before extraction; (b) after extraction
Fig. 7. Schematics of window descriptor matching of the same speckle at different measurement distances
Fig. 8. Convolution process of speckle window descriptor and matching result. (a) Convolution process; (b) matching result
Fig. 9. Schematic of speckle ranging module
Fig. 10. Comparison of speckle images processed by absolute threshold binarization and adaptive threshold binarization. (a) Speckle image 1; (b) spekle image 2; (c) spekle image 3; (d) spekle image 4
Fig. 11. Number of speckle obtained by absolute threshold binarization and adaptive threshold binarization
Fig. 12. Effects of window size of descriptor on matching result. (a) Relationship between window size and number of speckle; (b) relationship between window size and error rate
Fig. 13. Depth map of a plane
Fig. 14. Accuracy of proposed algorithm and other algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20