
Fang Wei, Yang Kui. Inverse Depth Adaptive Weighting Based Multi-View Triangulation Method[J]. Chinese Journal of Lasers, 2020, 47(12): 1204007
- Chinese Journal of Lasers
- Vol. 47, Issue 12, 1204007 (2020)
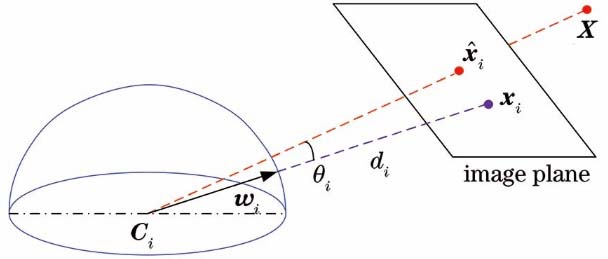
Fig. 1. Schematic diagram of triangulation description

Fig. 2. Implementation process of our method
Fig. 3. Synthetic datasets for multi-view triangulation. (a) Type A; (b) type B; (c) type C
Fig. 4. Iteration performance at different noise levels
Fig. 5. Multi-view triangulation results of our method under the public datasets. (a) Lund Cathedral; (b) Aos Hus; (c) San Marco; (d) Orebro Castle; (e) Buddah Statue; (f) East Indiaman Goteborg; (g) Ystad Monestary; (h) Round Church; (i) Skansen Kronan; (j) Skansen Lejonet
Fig. 6. Number of iterations of our method for multi-view triangulation in public datasets
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Results obtained by the multi-view triangulation method based on simulation data
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Results of different methods based on Lund's public dataset
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Experimental results of different methods on the Lund public dataset (σ=5 pixel)

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20