
Lei Xia, Yuanzhang Hu, Wenyu Chen, Xiaoguang Li, "Decoupling of the position and angular errors in laser pointing with a neural network method," High Power Laser Sci. Eng. 8, 03000e28 (2020)
- High Power Laser Science and Engineering
- Vol. 8, Issue 3, 03000e28 (2020)
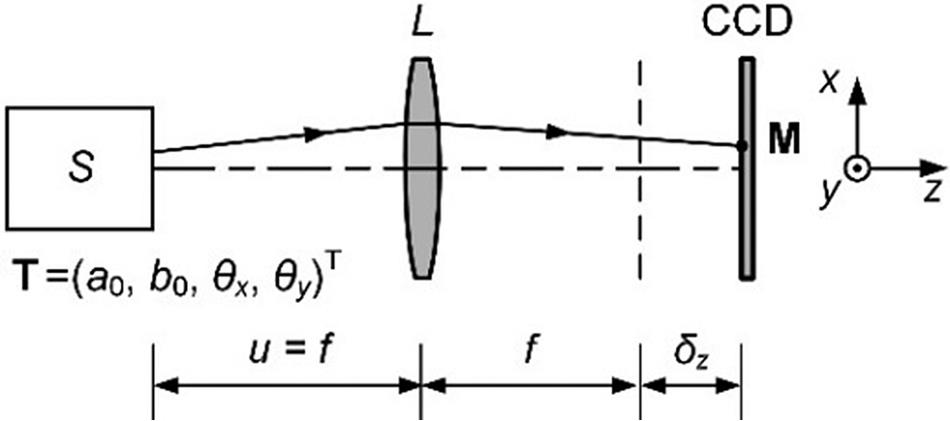
Fig. 1. Prototype laser-pointing system. S is the laser source; L is the thin lens; M is the spot image on the CCD; T is the beam tilt of the waist center on the source plane; a 0, θx are the position offset and inclination angle of the beam relative to the optical axis in the x direction, respectively, and b 0, θy are those in the y direction; u is the distance between the source plane and the lens; f is the focal length; δz is the defocus distance of the CCD. The optical axis of the system is along the z direction.
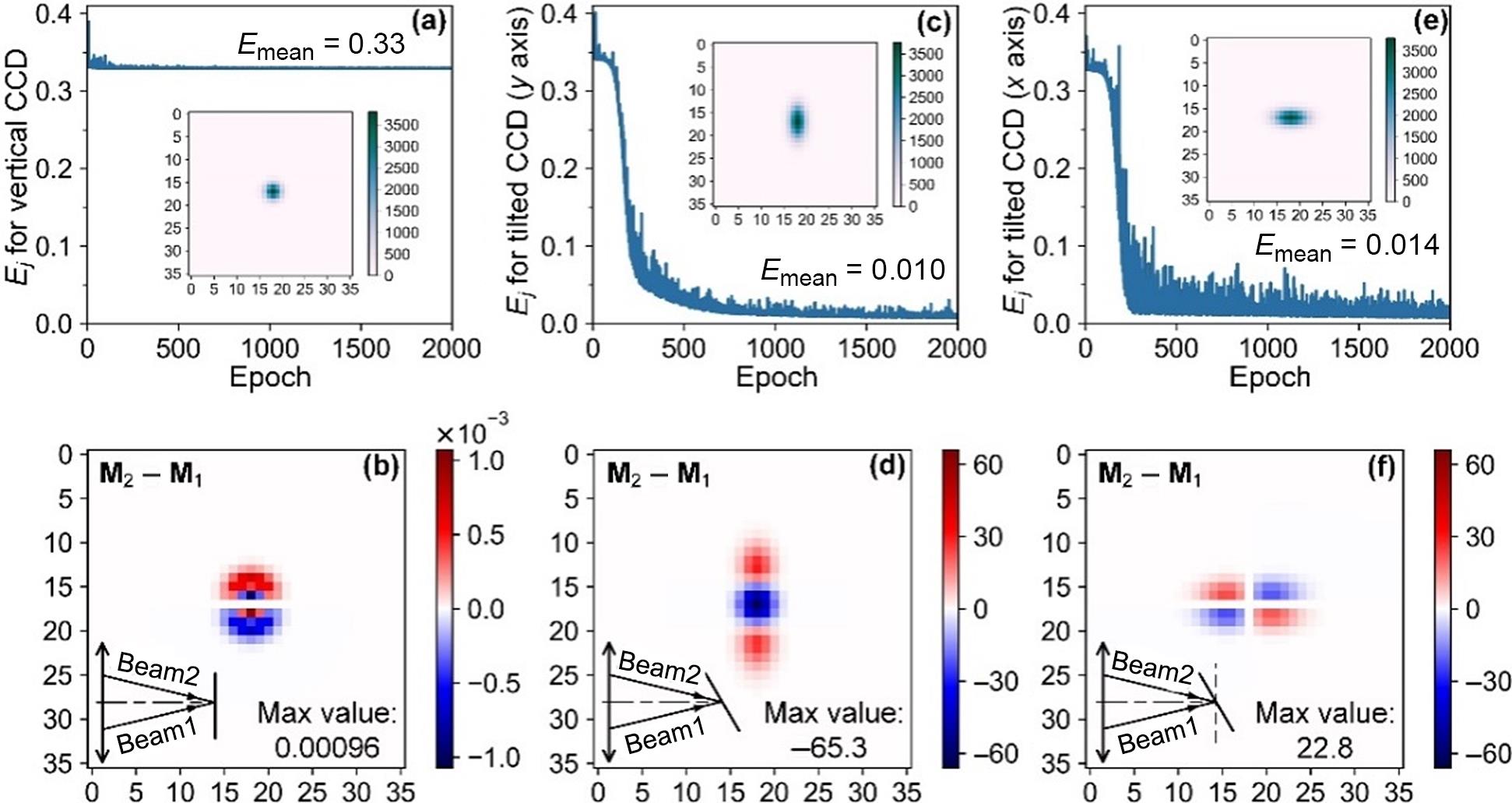
Fig. 2. Prediction errors Ej for all epochs, spot image M 2 and image difference for beam tilts in the x direction. (a) and (b) show the prediction errors, the spot image and image difference on the vertical CCD, respectively. (c) and (d) show those on the tilted CCD with a rotation of 60° around the y -axis. (e) and (f) show those on the tilted CCD with a rotation of 60° around the x -axis.
Fig. 3. Prediction performances E mean with different focal lengths f , tilting angles θ and defocus distances δz . (a) and (b) show spot samples and the prediction performance with typical focal lengths f = 40 and 100 mm, respectively. The partially enlarged plot in the dotted rectangle represents the prediction results for θ = 60°. (c) and (d) show the prediction performance when the tilting angles are 45° and 60°, respectively.


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20