Xin LI1,2,3, Wei ZHU1,3,*, Qing-shan LUO1,2,3, Tong ZOU1,2,3, and Tang-yong GUO1,3
Author Affiliations
1Key Laboratory of Earthquake Geodesy, Institute of Seismology, China Earthquake Administration, Wuhan 430071, China2Institute of Disaster Prevention, Sanhe, Hebei 065201, China3Hubei Key Laboratory of Earthquake Early Warning, Hubei Earthquake Agency, Wuhan 430071, Chinashow less
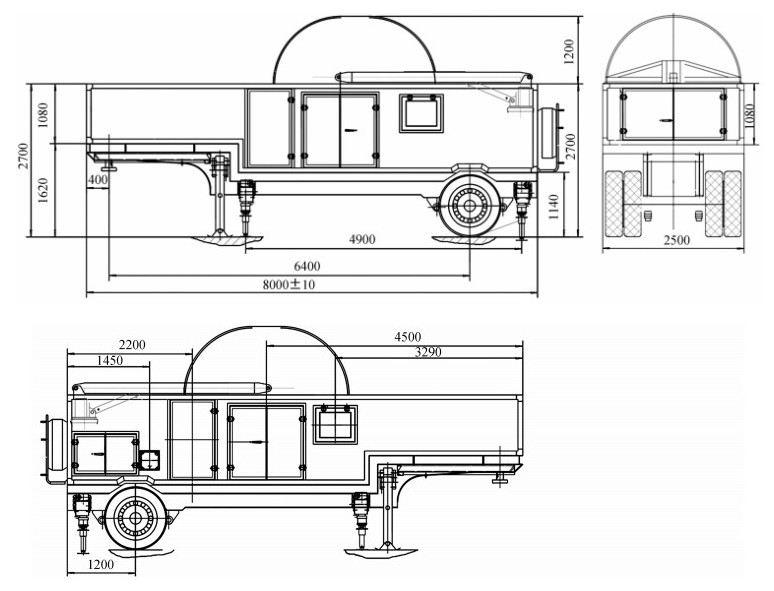
Fig. 1. TROS1000外形尺寸Overall dimension diagram of TROS1000
Fig. 2. TROS1000运输状态Transportation diagram of TROS1000
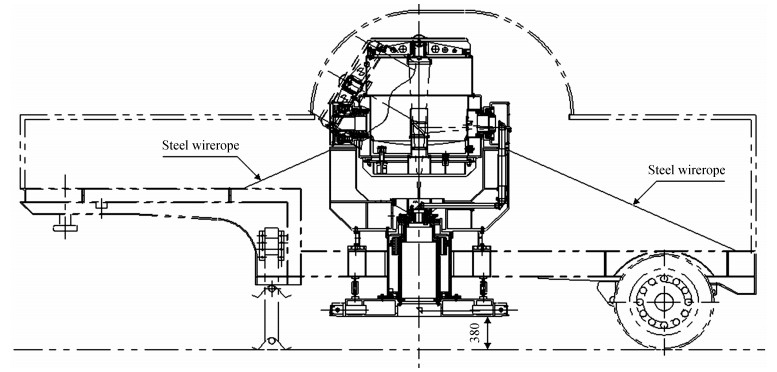
Fig. 3. TROS1000工作状态Operation diagram of TROS1000
Fig. 4. TROS1000在南山观测站架设图Setup diagram of TROS1000 in Nanshan Station
Fig. 5. RG-L-532激光器光路结构Optical path diagram of RG-L-532 Laser
Fig. 6. kHz激光测距脉冲时序Time diagram of kHz laser ranging
Fig. 7. 事件计数器原理Princple diagram of event timer
Fig. 8. 距离门实现原理Princple diagram of range gate generator
Fig. 9. kHz激光测距Ajisai卫星观测数据Diagram of Ajisai data in kHz SLR
Fig. 10. kHz激光测距Lageos1卫星数据预处理Preprocessing diagram of Lageos1 data in kHz SLR
| Item | Specification | | Repetition rate/kHz | 0.01~10 | | Wave length/nm | 532 | | Pulsewidth/ps | 10~15 | | Pulseenergy/mJ | 3 | | Beammode | TEM00 | | Beamquality factor/M2 | < 1.3 | | Long term stability | ±3% | | Beampointing stability/μrad | < 20 | | Beamdivergence/mrad | 0.6 | | Resonatorcavity length/mm | 1 900 | | Beamdiameter/mm | 1.3 |
|
Table 1. Specifications of RG-L-532 Laser
| UTC time | Satellite | Orbit altitude/km | Valid echo | RMS precision/mm | Arc length/s | Valid echo rate/% | | 2019-09-19 13:59 | Ajisai | 1 485 | 17 369 | 9 | 216 | 13.5 | | 2019-09-19 14:04 | Glonass122 | 19 140 | 954 | 19 | 642 | 1.3 | | 2019-09-19 15:18 | Jason2 | 1 336 | 13 562 | 9 | 366 | 22.1 | | 2019-09-19 16:01 | Ajisai | 1 485 | 15 377 | 14 | 234 | 21.8 | | 2019-09-19 16:06 | Jason3 | 1 336 | 8 621 | 10 | 168 | 29.7 | | 2019-09-19 16:11 | Lares | 1 450 | 1 934 | 11 | 180 | 7.2 | | 2019-09-19 16:15 | Glonass129 | 19 140 | 3 244 | 16 | 582 | 5.8 | | 2019-09-19 16:49 | Lageos1 | 5 850 | 36 670 | 9 | 888 | 11.4 | | 2019-09-19 17:12 | Jason2 | 1 336 | 3 293 | 10 | 168 | 14.8 |
|
Table 2. Preprocessing result of kHz SLR
| TROS-I | TROS1000 | | Observation time | Night | Day and night | | Track method | Analog digital hybrid | Digital | | Laser type | Solid-state dye | Diode | | Repetition rate/Hz | 1~10 | 1 000 | | Pulsewidth/ps | 30~50 | 10~15 | | Receivingaperture/cm | 38 | 100 | | Communication port | Serialport | Network |
|
Table 3. Compare with TROS-I and TROS1000
| UTC time | Satellite | Orbit altitude/km | Valid echo | RMS precision/mm | Arc length/s | Valid echo rate/% | | 2003-05-15 14:11 | Topex | 1 350 | 511 | 40 | 245 | 51 | | 2003-05-15 14:28 | Ajisai | 1 485 | 600 | 50 | 418 | 56 | | 2003-05-15 15:11 | Lageos2 | 5 625 | 75 | 38 | 656 | 43 | | 2003-05-15 15:23 | BEC | 927 | 460 | 32 | 242 | 55 | | 2003-05-15 16:00 | Topex | 1 350 | 248 | 37 | 247 | 51 | | 2003-05-15 16:24 | Ajisai | 1 485 | 734 | 38 | 476 | 57 | | 2003-05-15 16:57 | GFO1 | 800 | 224 | 37 | 363 | 56 | | 2003-05-15 17:13 | BEC | 927 | 271 | 27 | 297 | 55 | | 2003-05-15 18:27 | Ajisai | 1 485 | 810 | 40 | 415 | 57 | | 2003-05-15 18:57 | Lageos2 | 5 625 | 161 | 30 | 1 264 | 45 | | 2003-05-15 20:31 | Ajisai | 1 485 | 371 | 35 | 597 | 58 |
|
Table 4. Preprocessing result of 10 Hz SLR
| UTC time | Satellite | Repetition rate/Hz | Valid echo | Arc length/s | Valid echo per second | | 2003-05-15 14:28 | Ajisai | 10 | 600 | 418 | 1.44 | | 2003-05-15 15:11 | Lageos2 | 10 | 75 | 656 | 0.11 | | 2003-05-15 16:24 | Ajisai | 10 | 734 | 476 | 1.54 | | 2003-05-15 18:27 | Ajisai | 10 | 810 | 415 | 1.95 | | 2003-05-15 18:57 | Lageos2 | 10 | 161 | 1 264 | 0.13 | | 2003-05-15 20:31 | Ajisai | 10 | 371 | 597 | 0.62 | | 2019-09-19 13:59 | Ajisai | 1 000 | 17 369 | 216 | 80.41 | | 2019-09-19 16:01 | Ajisai | 1 000 | 15 377 | 234 | 65.71 | | 2019-09-19 16:49 | Lageos1 | 1 000 | 36 670 | 888 | 41.30 |
|
Table 5. Comparison of two laser ranging results in unit time