
Geng Wang, Fei Xing, Minsong Wei, Ting Sun, Zheng You, "Optimization method for star tracker orientation in the sun-pointing mode," Chin. Opt. Lett. 15, 081201 (2017)
- Chinese Optics Letters
- Vol. 15, Issue 8, 081201 (2017)
Abstract
The star tracker is an optical attitude sensor with extremely high accuracy, the structure of which is mainly composed of the baffle, the lens, the image detector, and the processing unit, and it has been widely used in satellites[
Many methods have been proposed to reduce the interference from the sunlight and the earthlight to the star tracker, including optimizing the processing algorithm of the star image to improve the accuracy[
In this Letter, a vector model was proposed to analyze the vector position of the sunlight and the earthlight in the body coordinate system of the satellite, which operates in the sun-synchronous orbit. Based on this model, the equations of the boundary curves of the earthlight were derived when the satellite was in the sun-pointing mode, and the vector areas not affected by the sunlight and the earthlight could be determined. Meanwhile, the orientation of the star tracker and the corresponding exclusion angle of the earthlight could be optimized. This method can not only optimize the installation orientation of the star tracker when the satellite is in the sun-pointing mode, but it can also obtain the exclusion angle of the earthlight and the sunlight.
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
For the sun-synchronous satellite, the relative position among the Earth, the satellite, and the Sun changes all the time, however, the right ascension difference between the ascending node and the mean sun is constant. Meanwhile, the angle between the sun light and the orbit plane periodically changes with a small variance. Therefore, we can concisely describe aforementioned relative position based on the body coordinate system of the satellite.
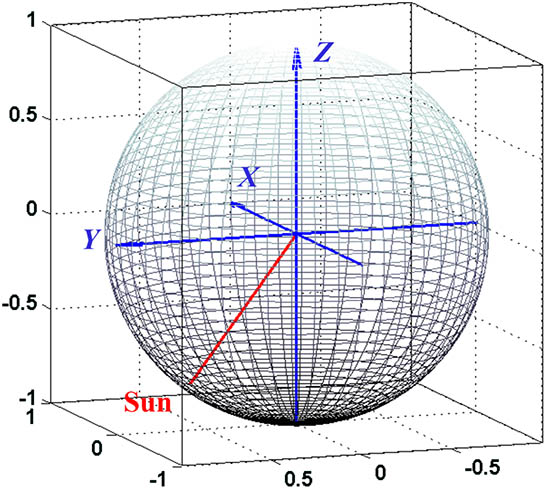
In this vector model, the complex rotation relationship among the Sun, the Earth, and the satellite is transformed so that the Earth and the Sun rotate around the satellite; thus, we can obtain the vector areas that suffered the sunlight and the earthlight based on the body coordinate system of the satellite. It is well known that any spatial orientation can be represented by the vector [
![]()
Figure 1.Attitude sphere model of the sunlight based on the body coordinate system of the satellite.
For the sun-synchronous satellite, the Sun is simplified as a pointolite. However, the earthlight comes from a cone area with respect to the satellite, as shown in Fig.
![]()
Figure 2.Model of the earthlight for the sun-synchronous orbit satellite.
In order to achieve enough energy, when the satellite is not under the remote imaging mode, the normal direction of the solar panels should always point to the Sun. However, for some small remote sensing satellites, their solar panels cannot rotate relatively to the satellite body. For these satellites, the satellite surface with the solar panels should always point to the Sun. In this Letter, when the satellite is in the nadir-pointing mode, the
![]()
Figure 3.(a) Nadir-pointing and (b) sun-pointing mode of the satellite.
In this case, the satellite has two operation modes and is equipped with the orbit control device, with the orbital altitude of 535 km and the local time of the descending node of 10:30. According to Eq. (
When the satellite is in the sun-pointing mode, since the
![]()
Figure 4.Sunlight vector in the body coordinate system of the satellite.
When the satellite is in the sun-pointing mode, the influence from the sunlight is straightforward; however, the influence from the earthlight is more complex. In this part, we simulated the relationship between the Earth–satellite vector and the body coordinate system of the satellite by the satellite tool kit (STK) for three years in orbit flight and extracted the equations of the boundary curves of the Earth–satellite vectors. Since the satellite had the orbit control device, the orbit parameters of the satellite were constant. The simulation results are shown in Fig.
| Characteristics | Angle range |
|---|---|
| 17.0791°–162.9209° | |
| 62.9930°–117.0135° | |
| 0°–180° |
Table 1. Maximum and Minimum Angles Between the Coordinate Axes and the Earth–satellite Vector Area
![]()
Figure 5.(Color online) Earth–satellite vector area in the body coordinate system of the satellite, (a) three-dimensional (3D) view, (b)
Based on the simulation results, the vector area can be expressed by two crossed boundary curves, as the view of Fig.
![]()
Figure 6.Boundary curves of the Earth–satellite vector area.
The earthlight is scattered light for the satellite in the sun-synchronous orbit. Based on the aforementioned analysis, the rotation boundaries of the earthlight can be derived from the boundary curves of the Earth–satellite vector area with factor
![]()
Figure 7.Boundary curves of the earthlight in the
The Earth–satellite vector rotates around the red area over time. Based on Eqs. (
Based on Eqs. (
![]()
Figure 8.Boundary curves of the Earth–satellite vector area.
As shown in Fig.
In order to verify this method, we simulated the exclusion angle of the earthlight when the orientation of the star tracker was in the range of area ① by the STK. Since the period of the earthlight variation was one year, the simulation duration was set to be one year. Based on the aforementioned analysis, when the orientation of the star tracker is in the center of area ①, the exclusion angle can reach the maximum, as shown in Fig.
| Angle between the star tracker orientation and axis of the coordinate system | 112° | 22° | 90° |
Table 2. Installation Orientation of the Star Tracker in Sun-pointing Mode
![]()
Figure 9.Installation orientation of the star tracker.
As shown in Fig.
![]()
Figure 10.Angle between star tracker orientation and the Earth–satellite vector for one year.
In this Letter, a novel method for the installation orientation of the star tracker is proposed when the satellite is in the sun-pointing mode. The area of the Earth–satellite vector is determined based on the attitude sphere model, which can describe the relative position among the Sun, the Earth, and the satellite body, and the equations of the boundary curves of the Earth–satellite area are derived. Moreover, the equations of earthlight boundary curves are calculated based on the relationship between the earthlight and the satellite, and the vector areas free from the earthlight and sunlight are determined during the period at the same time. Based on the vector area free from the earthlight and the sunlight, the pointing orientation of the star tracker is optimized. The simulation results indicate that the angles between the star tracker orientation and the earthlight are consistent with the design, and this method can effectively solve the installation orientation problem of the star tracker when the satellite is in the sun-pointing mode.
References
[1] C. C. Liebe. IEEE Aerosp. Electron. Syst. Mag., 10, 10(1995).
[2] C. C. Liebe. IEEE Trans. Aerosp. Electron. Syst., 38, 587(2002).
[3] J. L. Jørgensen, T. Denver, M. Betto, P. Van den Braembussche. Acta Astronaut., 56, 153(2005).
[4] J. Enright, D. Sinclair, C. Grant, G. McVittie, T. Dzamba. Small Satellite Conference(2010).
[5] Z. Li, H. Lu, X. Yuan. Chin. Opt. Lett., 13, 111101(2015).
[6] D. Michaels, J. Speed. 2005 IEEE Aerospace Conference, 1(2005).
[7] T. Dzamba, J. Enright, D. Sinclair, K. Amankwah, R. Votel, I. Jovanovic, G. McVittie. Proceedings from 28th Annual AIAA/USU Conference on Small Satellites(2014).
[8] T. Sun, F. Xing, Z. You, M. Wei. Opt. Express, 21, 20096(2013).
[9] T. Sun, F. Xing, X. Wang, Z. You, D. Chu. Sci. Rep. UK, 6, 22593(2016).
[10] H. Zhou, Y. Yu. Chin. Opt. Lett., 14, 121501(2016).
[11] J. P. Arnoux. Proc. SPIE, 2864, 333(1996).
[13] J. A. P. Leijtens. Star Tracker with Baffle(2012).
[14] S. H. McCall, S. M. Pompea, R. P. Breault, N. L. Regens. Proc. SPIE, 1753, 158(1993).
[15] Y. S. Lee, Y. H. Kim, Y. Yi, J. Kim. J. Korean Astron. Soc., 33, 165(2000).
[16] F. Jiancheng, N. Xiaolin. IEEE Trans. Instrum. Meas., 58, 3576(2009).
[17] L. Zhao, Z. Su, Y. Hao. Transducer Microsyst. Technol., 12, 9(2013).
[18] R. Vaughan, D. O’shaughnessy. AIAA Guidance, Navigation and Control Conference and Exhibit, 7479(2008).
[19] G. Wang, F. Xing, M. Wei, Z. You. Appl. Opt., 54, 10467(2015).
[20] M. Wei, F. Xing, Z. You, G. Wang. Opt. Express, 22, 23094(2014).
[21] L. Blarre, J. Ouaknine, L. Oddos-Marcel, P. E. Martinez. AIAA Guidance, Navigation, and Control Conference and Exhibit(2006).
[22] E. van Breukelen. Proceedings of the 60th International Astronautical Congress, 12(2009).


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20