
Jie Xu, Hui Liu, Yue Shen, Guanxue Yang, Hao Zhou, Siyuan Wang. Point Clouds Classification and Segmentation for Nursery Trees Based on Improved PointNet++ Model[J]. Chinese Journal of Lasers, 2024, 51(8): 0810001
- Chinese Journal of Lasers
- Vol. 51, Issue 8, 0810001 (2024)
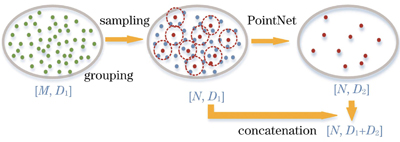
Fig. 1. Schematic diagram of feature fusion strategy
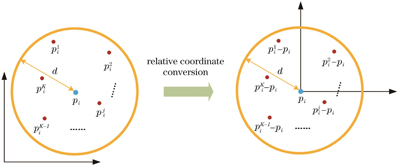
Fig. 2. Acquisition of relative coordinates of neighboring points for each local area
Fig. 3. Model combining coordinate attention mechanism and attentive pooling
Fig. 4. Classification branch of improved model
Fig. 5. Segmentation branch of improved model
Fig. 6. Nursery for data collection. (a) Whole scene of nursery; (b) part of scene of nursery
Fig. 7. Livox Horizon laser sensor and acquired point clouds. (a) Livox Horizon laser sensor; (b) acquired point clouds
Fig. 8. Seven common kinds of landscape trees. (a) Osmanthus fragrans; (b) Malus halliana; (c) cherry plum; (d) Acer palmatum; (e) Chimonanthus praecox; (f) loquat tree; (g) Chinese holly
Fig. 9. Schematic diagram of segmented point clouds of seven tree species. (a) Osmanthus fragrans; (b) Malus halliana; (c) cherry plum; (d) Acer palmatum; (e) Chimonanthus praecox; (f) loquat tree; (g) Chinese holly
Fig. 10. Confusion matrixes. (a) PointNet; (b) PointNet++; (c) ours
Fig. 11. Examples of visualization of segmentation results using PointNet, PointNet++, and proposed model (white boxes denote wrong predicted points). (a) Ground truth; (b) segmentation results of PointNet; (c) segmentation results of PointNet++; (d) segmentation results of proposed model
|
Table 1. Laser parameters
|
Table 2. Numbers of samples, point cloud groups, and groups in training and testing sets for different types of trees
|
Table 3. Software and hardware parameters for experiment
|
Table 4. Testing results of classification on self-made dataset
|
Table 5. Testing results of segmentation on self-made dataset


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20