
Yigeng Huang, Daqing Wang, Man Jiang, Haoyu Yin, Lifu Gao. Laser Fringe Segmentation and Feature Points Location Method of Weld Image Based on Multi-Task Learning[J]. Chinese Journal of Lasers, 2023, 50(16): 1602108
- Chinese Journal of Lasers
- Vol. 50, Issue 16, 1602108 (2023)
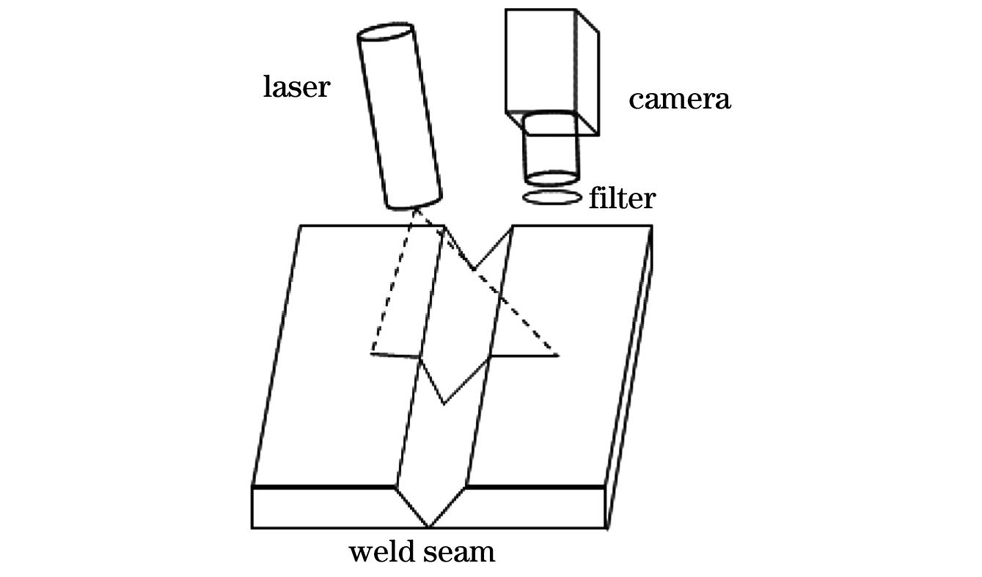
Fig. 1. Schematic of weld information measurement
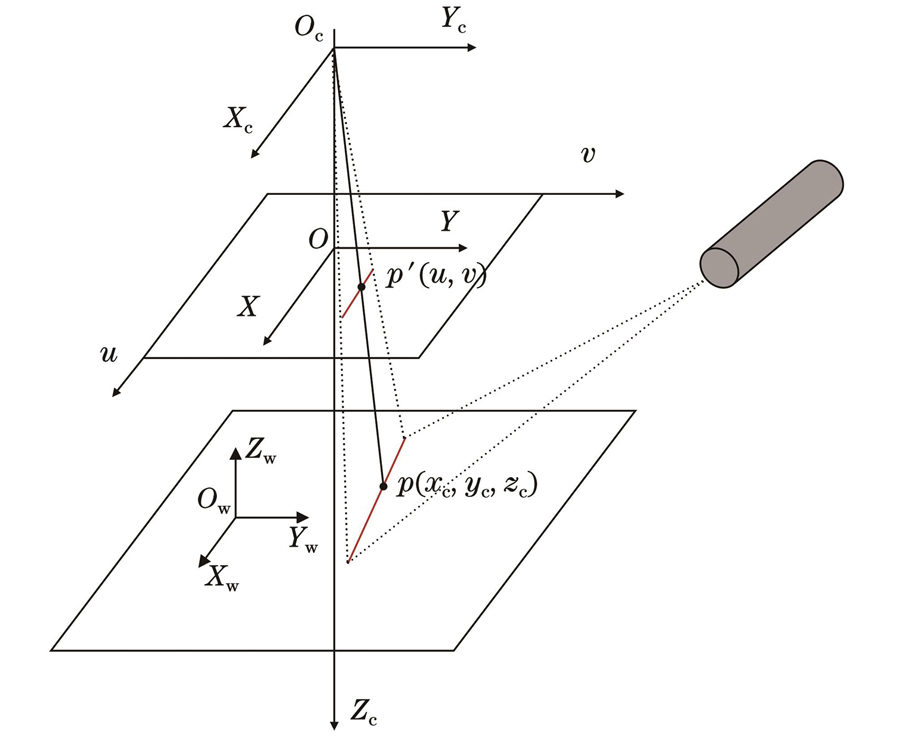
Fig. 2. Projection model measurement (
Fig. 3. Network structure. (a) Our network; (b)-(d) Detail/Seg Head, ARM, and FFM modules used in the model
Fig. 4. STDC module
Fig. 5. DSNT module
Fig. 6. Training loss of proposed model
Fig. 7. Detail label generation
Fig. 8. Laser stripe segmentation results. (a) Original images; (b) laser stripe label images; (c) weld seam features extracted by FCN-8s; (d) features extracted by our method with detailed information supervision; (e) features extracted by our method without detailed information supervision
Fig. 9. Location results of weld feature points by DSNT method under different noise interferences, where the green and blue “+” are left and right feature points and yellow “+” is intermediate feature point
Fig. 10. Comparison of feature point location results. (a1)-(a3) Extraction errors of left feature point, intermediate feature point, and right feature point in u-axis direction in weld image, respectively; (b1)-(b3) left feature point, intermediate feature point, and right feature point in v-axis direction in weld image, respectively
Fig. 11. Comparison of location errors of subtask correlation feature points. (a) In u-axis direction; (b) in v-axis direction
Fig. 12. Time consumption in processing for image sequence
|
Table 1. Feature point positioning branch structure
|
Table 2. Comparison of laser stripe segmentation accuracy
| ||||||||||||||||||||||||||
Table 3. Comparison of inference time of different networks

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20