
Jiafeng XU, Yunmei LI, Jie XU, Shaohua LEI, Shun BI, Ling ZHOU. Adaptive Threshold for Surface Shadow Detection of Black and Odor Water [J]. Journal of Geo-information Science, 2020, 22(10): 1959
- Journal of Geo-information Science
- Vol. 22, Issue 10, 1959 (2020)
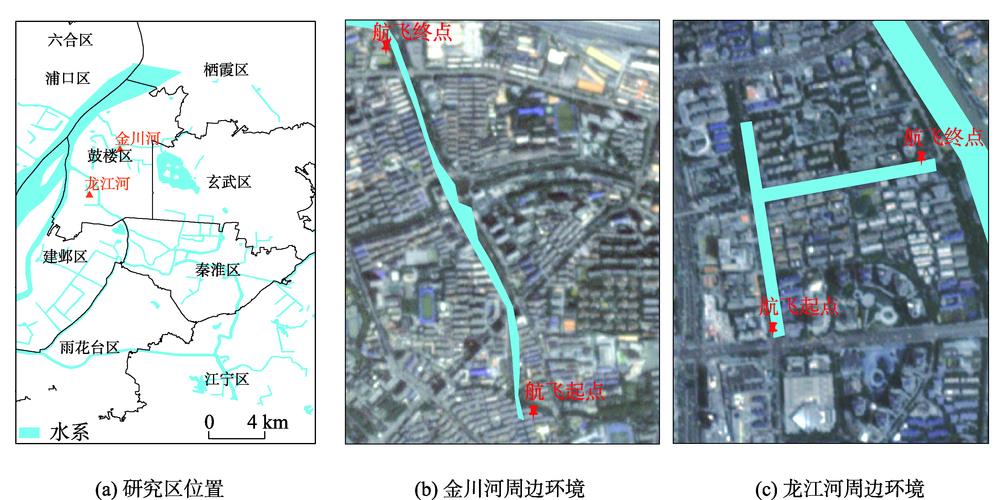
Fig. 1. The geographical location and surrounding environment of the study area
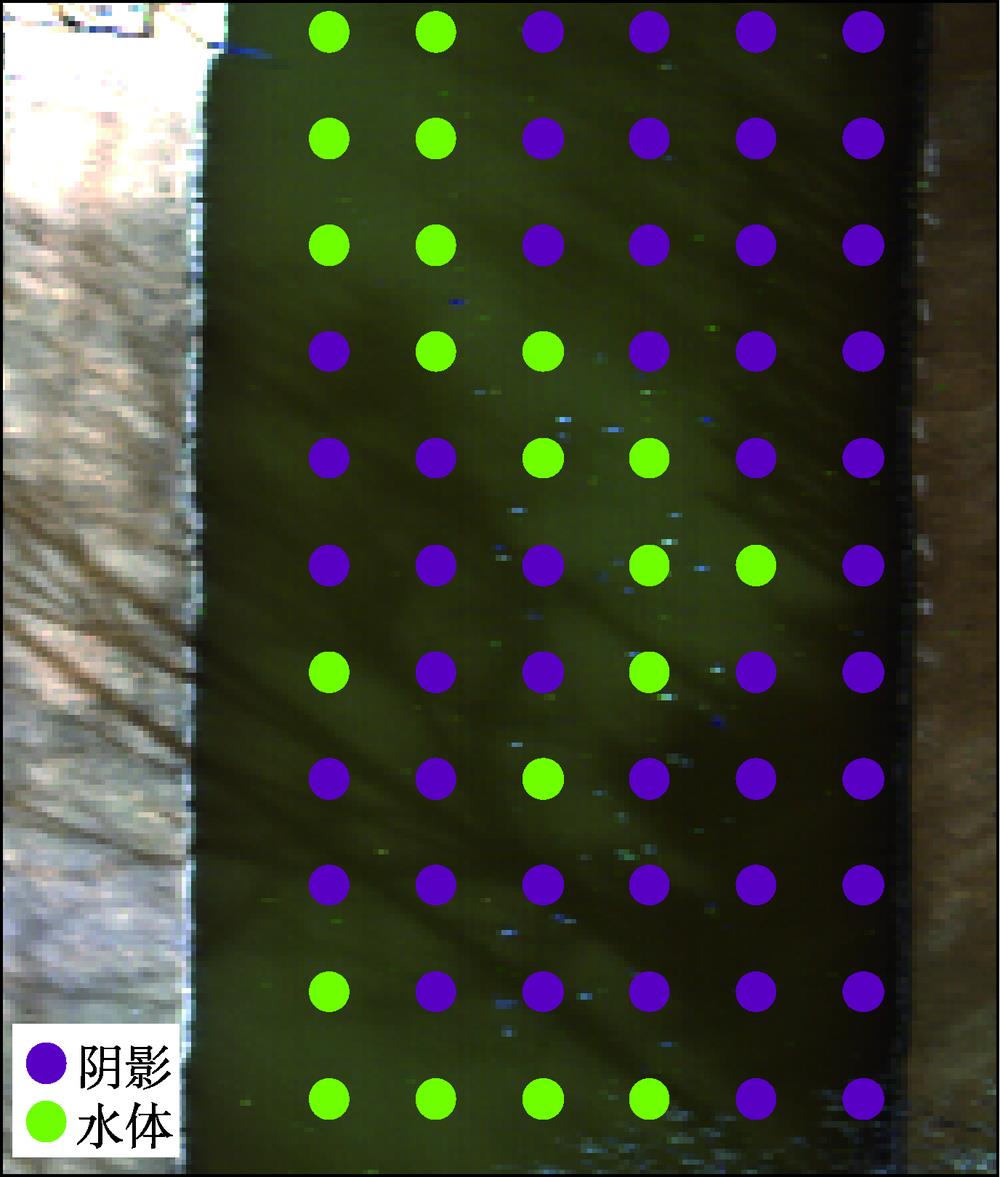
Fig. 2. Example of sampling point collection
Fig. 3. Spectral characteristics of non-shadow water, shadow and vegetation on water surface
Fig. 4. The scatter diagram of reflectance at 666 nm/791 nm and 492 nm
Fig. 5. Umbra, penumbra, non-shadow water image and reflectance spectral comparison
Fig. 6. The process of surface shadow detection
Fig. 7. The shadow detection result of test scenario 1
Fig. 8. The shadow detection result of test scenario 2
Fig. 9. The shadow detection result of test scenario 3
Fig. 10. The shadow detection result of test scenario 4
Fig. 11. Building shadow and tree shadow recognition effect
Fig. 12. Analysis on the effect of floating objects on water shadow detection
Fig. 13. The results of shadow detection when divided into 2 and 3 categories
Fig. 14. Black and odor water recognition result in test scenario 3 before and after shadow mask
|
Table 1. Main technical parameters of the instrument and equipment
| ||||||||||||||||||||||||||||||||||||||||||||
Table 2. Accuracy evaluation of each test scenario
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. The pixel proportion of black and odor water identified before and after shadow extraction


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20