
Qichang An, Jingxu Zhang, Fei Yang, Hongchao Zhao, "Normalized point source sensitivity analysis in GSSM prototype," Chin. Opt. Lett. 15, 111202 (2017)
- Chinese Optics Letters
- Vol. 15, Issue 11, 111202 (2017)
Abstract
The Thirty Meter Telescope (TMT) is one of the largest telescopes in this world. Its optical system contains a unique tertiary mirror, guiding the light beam to instruments on two science platforms. The Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences (CIOMP) takes charge of the tertiary mirror that is noted as the Giant Steerable Science Mirror (GSSM). The
To achieve the specification of the GSSM prototype (GSSMP) performance, a suitable index is required. When the index releases enough information, the single index is better than a standard in terms of the form of curve. Normalized point source sensitivity (PSSn) is a well suited index for large telescope performance top-down error budgeting and bottom-up verification[
The relation between slope RMS and PSSn can be established by analysis. Differences of the mirror figure data will reach the slope data. Slope RMS is accessed by PSSn though power spectral density (PSD). Pointing performance is an important requirement. With the help of the atmosphere structure function, slope RMS and PSSn are related to pointing performance. The tracking jitter is a key performance of the GSSMP. The degradation of GSSMP optical transmission capacity is evaluated by slope RMS and PSSn. The requirement is very demanding, requiring an understanding of the sources of jitter error and improving the performance[
From the aspect of system engineering, it is always confusing to find an index, considering both the atmosphere and the influence of telescope itself. Point source sensitivity (PSS) is an index to realize in the following:
The optical transfer function (OTF) of atmosphere is
Similar to the Strehl ratio, when the PSS is normalized by the OTF of the atmosphere, the normalized index is easy to check and understand.
So, PSSn is computed as
The OTF of atmosphere is
Similar to RMS, slope RMS is hard for composing a large amount of error sources. Subsystems will result in the degradation of the large telescope’s overall performance. What is worse, different frequency components will bring more difficulties to the error budget. It is impossible to allocate or verify errors in such a large system without metric specifying frequency information.
Besides, it is necessary for the systems engineer to understand the relationship between slope RMS and PSSn, so that the slope RMS value can be found equivalent to the PSSn requirement.
Equal to Zernike polynomials, the discrete Fourier series is a completed description of the wave front, specifically, a simpler presentation.
Similar to the Zernike polynomials, the wave front can be expressed by the Fourier series, as is shown in
To simplify the presentation, the image part of
The PSD of the sine-formed wave front
On the other hand, PSD is related to PSSn by
The weighted slope RMS is a better index for the specification of a large telescope. A single slope RMS requirement for all conditions is the current approach; however, the slope RMS will present more information when more conditions are considered. In both the time and spatial domains, weighted slope RMS is employed.
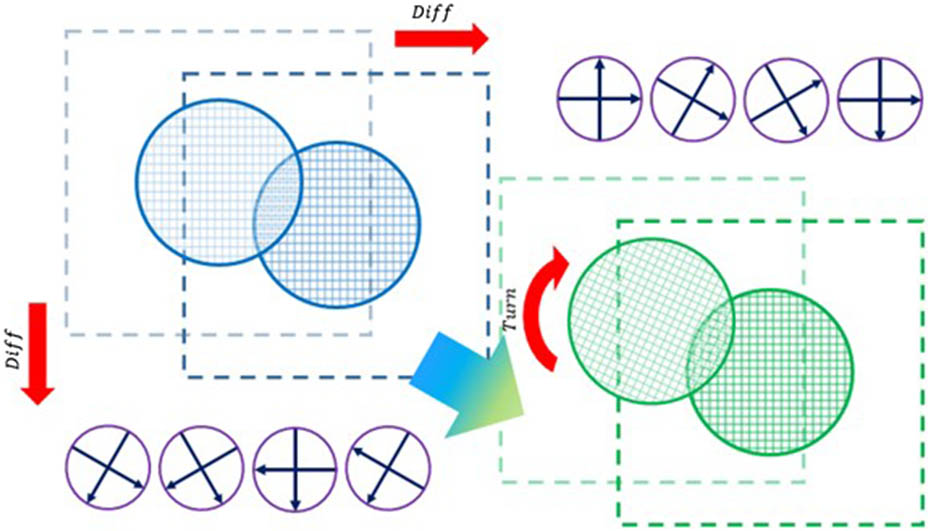
In the spatial domain, the traditional calculation of slope RMS is accessed in relation to the difference in two directions. However, the difference the other directions may also present important information. Setting a coordinate system on the wave front under test, the original one is
The wave front is turned
![]()
Figure 1.Procedure of rotation-averaging slope RMS calculation.
In the time domain, different zenith angles and targeted instruments are related to a certain probability,
Hence, the final weighted PSSn is computed as shown in
The atmosphere relation length at
![]()
Figure 2.GSSMP figure at different zenith angles.
The calculation of the slope RMS is concerned about the spatial sampling grid size. In the left panel of Fig.
![]()
Figure 3.PSSn and slope RMS versus the GSSMP spatial sampling grid size.
For the pointing performance, according to the definition of full width and half-maximum (FWHM), the FWHM
According to the definition of slope RMS, the slope RMS of the sine-formed wave front
Setting
Here,
The multiplied OTF is the product of OTF according to a different component in one piece of frequency, according to the principle of energy. Rewriting Eq. (
Tracking is the most important and demanding performance. The testing is limited by the minimum velocity command that could be generated by the controller.
Due to the influence of mass, inertia, resonant frequencies, bearings, drives, encoders, and servo bandwidth, the servo system will respond to encoder noise within the loop bandwidth. Noise will contribute to the system jitter. The jitter at 3.6 inch/s speed at the zenith angle of 10° is shown in Fig.
![]()
Figure 4.Profile for tracking testing at varied zenith angles.
![]()
Figure 5.GSSMP figure under vibration.
In conclusion, subsystems involve degradation to the overall performance of the large telescope. Different frequency components result in more difficulties to the error budget. PSSn and slope RMS are investigated to overcome these problems. Combined with the easy approach of slope RMS and multipliable characteristics, the error of the complicated system is able to be allocated and verified.
References
[1] L. Stepp. Proc. SPIE, 8444, 84441G(2012).
[2] M. K. Cho. Performance prediction of the TMT tertiary mirror, Ritchey–Chrétien design(2007).
[3] G. Z. Angeli, S. Roberts, K. Vogiatzis. Proc. SPIE, 7017, 701704(2008).
[5] G. Z. Angeli, B. J. Seo, C. Nissly, M. Troy. Proc. SPIE, 8127, 812709(2011).
[6] F. Yang, G. Liu, Q. An, X. Zhang. Chin. Opt. Lett., 13, 041201(2015).
[8] Y. Bao, X. Yi, Z. Li, Q. Chen, J. Li, X. Fan, X. Zhang. Light Sci. Appl., 4, e300(2015).


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20