
Gao-fei GU, Jun ZHAO, Ming KONG, Tian-tai GUO, Dao-dang WANG. Tomographic Three-dimensional Particle Position Measurement Based on Light Field Camera[J]. Acta Photonica Sinica, 2020, 49(8): 0812002
- Acta Photonica Sinica
- Vol. 49, Issue 8, 0812002 (2020)
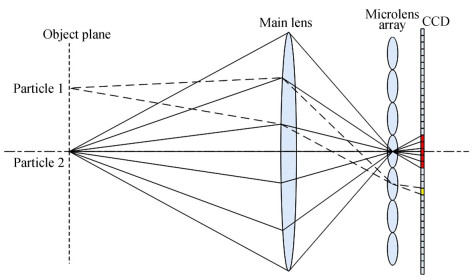
Fig. 1. Structure schematic of Lytro light field camera
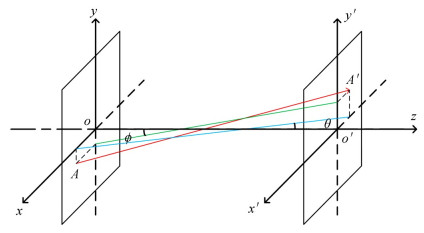
Fig. 2. Schematic diagram of biplane parameter method
Fig. 3. Blob model in macro and sectional view of particle intensity
Fig. 4. Schematic diagram of tomographic reverse light tracing
Fig. 5. 2D calculation of weighting matrix
Fig. 6. Schematic of calculating particle depth position using similar triangle method
Fig. 7. Lytro camera
Fig. 8. Enlarged and detail images of particle after demosaicing
Fig. 9. Enlarged and detail images of particle after decoding
Fig. 10. Particle images after orthogonal resampling
Fig. 11. Experiment device
Fig. 12. Relative error of particle inversion position using MART algorithm
Fig. 13. Relative error of particle inversion position using improved MART algorithm
Fig. 14. Absolute error of 3D position inversion of random particles
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Physical parameters of Lytro camera
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. 3D position inversion results of random particles

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20