
Jinkui CHU, Jianhua CHEN, Jinshan LI, Kun TONG, Jin LI, Hanpei HU. Polarized Light/binocular Vision Bionic Integrated Navigation Method[J]. Acta Photonica Sinica, 2021, 50(5): 184
- Acta Photonica Sinica
- Vol. 50, Issue 5, 184 (2021)
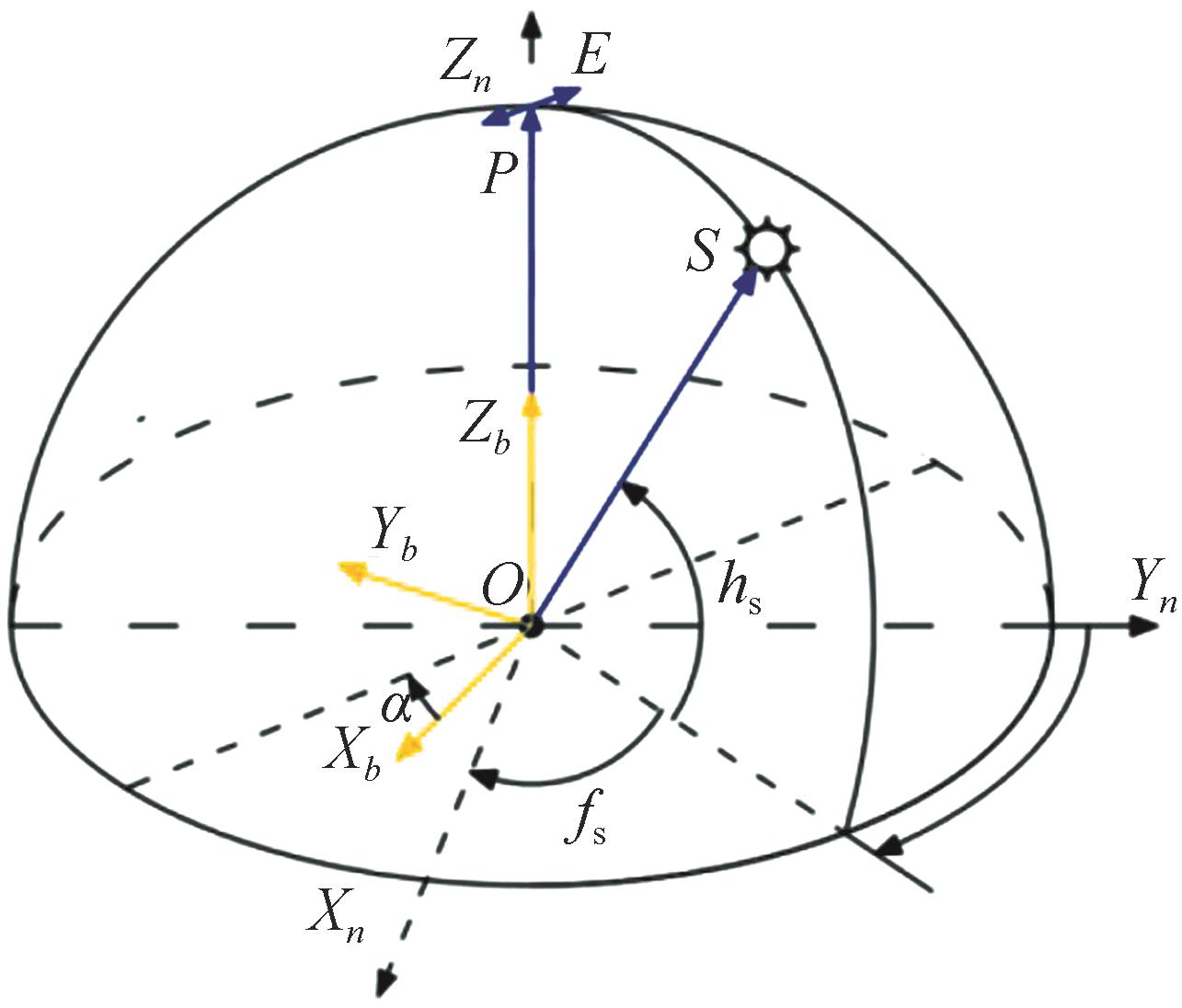
Fig. 1. Schematic diagram of polarized light orientation principle
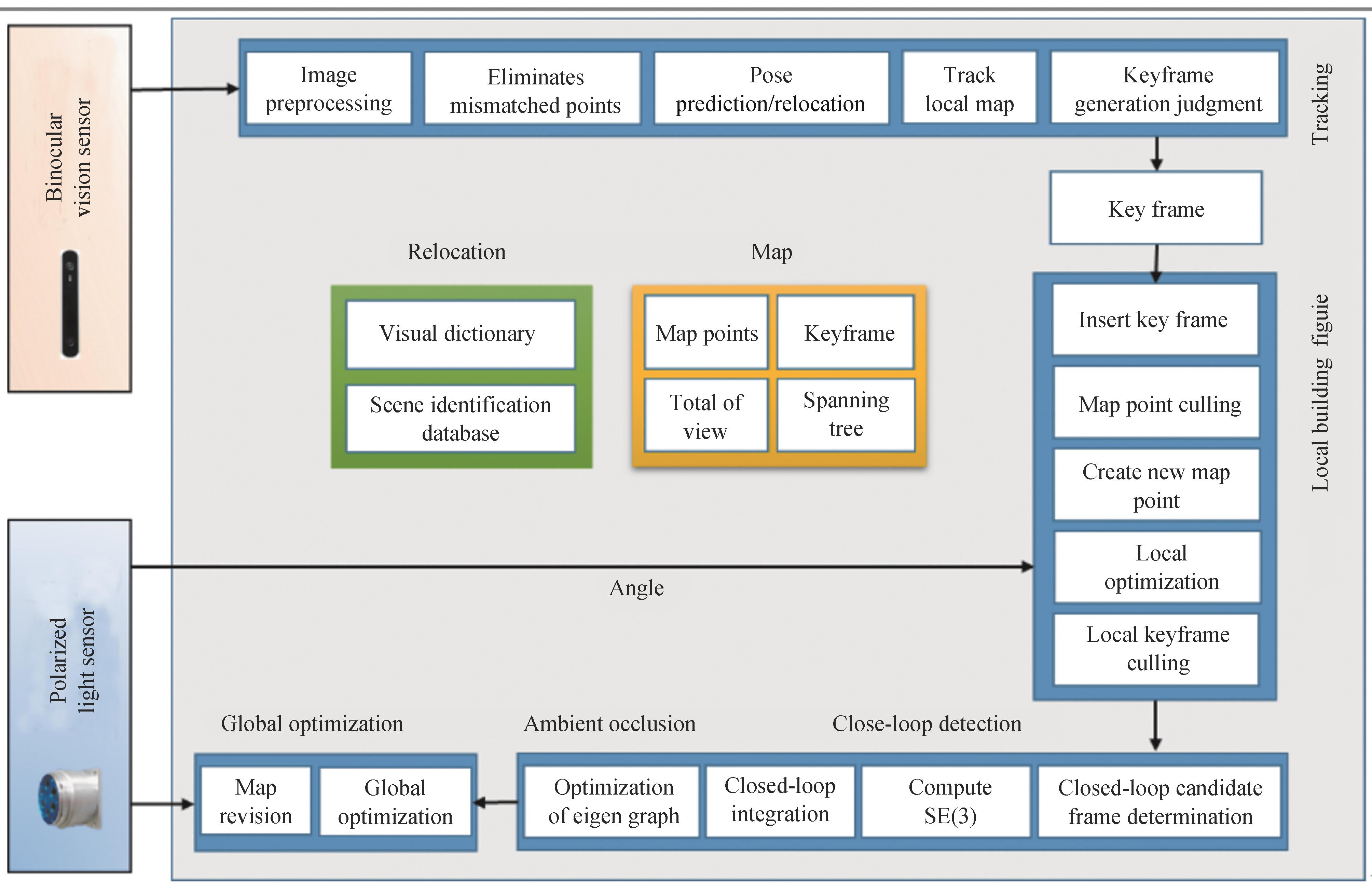
Fig. 2. Bionic combination navigation system
Fig. 3. Combined navigation solutions
Fig. 4. Bionic combined navigation system platform building
Fig. 5. Angle experimental apparatus
Fig. 6. SLAM versus polarized light heading angle
Fig. 7. Experimental platform for vehicle navigation
Fig. 8. Laboratory recording site
Fig. 9. Vehicle navigation track
Fig. 10. Vehicle-mounted navigation heading angle
Fig. 11. RPE error in polarized light /SLAM combination
Fig. 12. RPE error in SLAM navigation
|
Table 1. Sensor parameters
|
Table 2. Result of two type integrated navigation system
|
Table 3. Comparison of angle error in two navigation modes
|
Table 4. Comparison of position error in two navigation modes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20