
Yu WANG, Wei-jiao JIANG. High Precision Attitude Determination Method for Star Camera Based on UKF[J]. Acta Photonica Sinica, 2020, 49(1): 0128001
- Acta Photonica Sinica
- Vol. 49, Issue 1, 0128001 (2020)
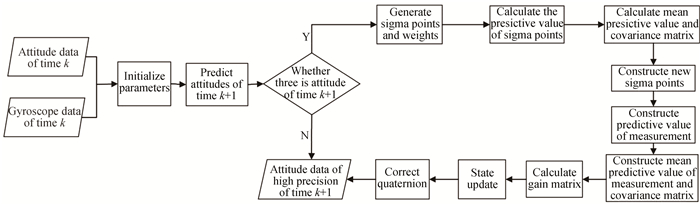
Fig. 1. 基于UKF的恒星相机和陀螺联合定姿算法流程The diagram of attitude determination algorithm for star camera and gyroscope based on UKF
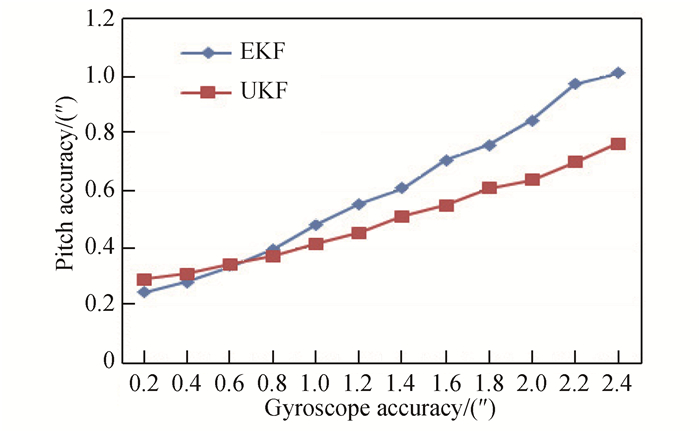
Fig. 2. Pitch angle results of experiment
Fig. 3. Roll angle results of experiment 3
Fig. 4. Yaw angle results of experiment 3
Fig. 5. Pitch angle comparison of UKF
Fig. 6. Roll angle comparison of UKF
Fig. 7. Yaw angle comparison of UKF
|
Table 1. Simulative data parameters of star camera and gyroscope
| ||||||||||||||||||||||||||
Table 2. Explanation of simulative experiments
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Results of simulative experiment 1
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Results of simulative experiment 2
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Results of simulative experiment 3


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20