Author Affiliations
1School of Information Engineering, Southwest University of Science and Technology, Mianyang 621010, Sichuan, China2Key Laboratory of Special Environment Robotics of Sichuan Province, Mianyang 621010, Sichuan, Chinashow less
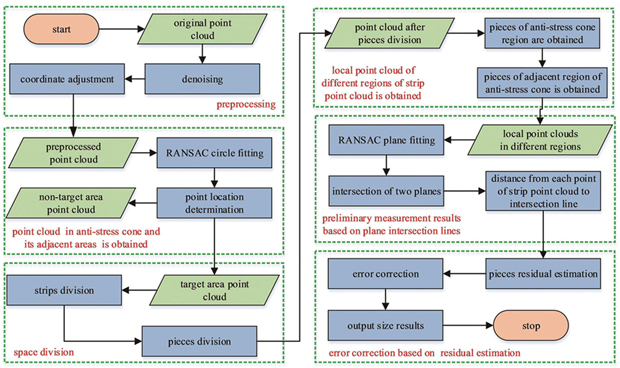
Fig. 1. Flow of anti-stress cone of cable joint parameter measurement algorithm
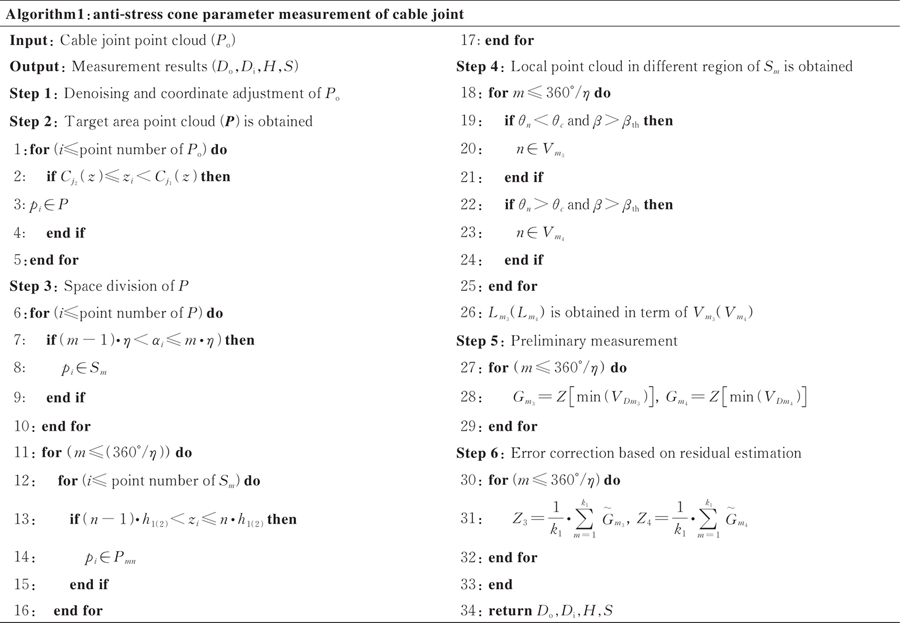
Fig. 2. Pseudocode of anti-stress cone of cable joint parameter measurement algorithm
Fig. 3. Cable joint.(a) Structure diagram; (b) physical diagram; (c) point cloud data
Fig. 4. Coordinate adjustment diagrams. (a) Before adjustment; (b) after adjustment
Fig. 5. Diagram of obtaining target point cloud. (a) Joint point cloud; (b) circle fitting results of joint point cloud; (c) target point cloud fitting circle; (d) target point cloud
Fig. 6. Change of cable joint fitting circle radius
Fig. 7. Space division of cable joint point cloud.(a) Target point cloud; (b) strips division mode; (c) strips division results of figure (a); (d) an example of strip point cloud; (e) pieces division results of figure (a); (f) an example of piece
Fig. 8. Analysis of piece points obtained by different space division methods. (a) Ours; (b) equal height division
Fig. 9. Concave-convex decision diagrams. (a) Convex diagram;(b) concave diagram
Fig. 10. Change of piece axis angle on strip point cloud
Fig. 11. Diagram of strip point cloud formed by planes and surfaces
Fig. 12. Calculation process diagram of starting point and ending point of anti-stress cone
Fig. 13. Diagram of error correction based on residual estimation
Fig. 14. Diagram of measured parameter of anti-stress cone
| Measuredparameter | Meaning | Calculation method |
|---|
| Di | End diameter | Diameter of fitting circle at | | Do | Start diameter | Diameter of fitting circle at | | H | Height | | | S | Slope length | |
|
Table 1. Explanation of measured parameters of anti-stress cone and their calculation methods
| Joint | Index | Measured value of radius change | | Measured value of ours |
|---|
| Di | Do | S | H | Di | Do | S | H |
|---|
| Standard joint | x* /mm | 46.40 | 78.40 | 57.28 | 55.00 | | 46.40 | 78.40 | 57.28 | 55.00 | | x /mm | 48.35 | 75.63 | 49.28 | 47.35 | | 46.29 | 78.39 | 57.42 | 55.13 | | e(x)/mm | -1.95 | 2.77 | 8.00 | 7.65 | | 0.11 | 0.01 | -0.14 | -0.13 | | er(x)/% | 4.20 | 3.53 | 13.97 | 13.91 | | 0.24 | 0.01 | 0.24 | 0.24 | | Points | 766310 | | 766310 | | Time /s | 6.63 | | 18.87 | | Artificial joint① | x* /mm | 47.00 | 78.00 | 53.79 | 51.50 | | 47.00 | 78.00 | 53.79 | 51.50 | | x /mm | 49.84 | 76.13 | 45.62 | 43.68 | | 46.88 | 78.32 | 53.21 | 50.83 | | e(x)/mm | -2.84 | 1.87 | 8.17 | 7.82 | | 0.12 | -0.32 | 0.58 | 0.67 | | er(x)/% | 6.04 | 2.40 | 15.18 | 15.18 | | 0.26 | 0.41 | 1.08 | 1.30 | | Points | 814402 | | 814402 | | Time /s | 7.14 | | 19.85 | | Artificial joint② | x* /mm | 45.50 | 77.50 | 59.68 | 57.50 | | 45.50 | 77.50 | 59.68 | 57.50 | | x /mm | 46.62 | 74.87 | 52.69 | 50.76 | | 45.97 | 77.21 | 59.28 | 57.19 | | e(x)/mm | -1.12 | 2.63 | 6.99 | 6.74 | | -0.47 | 0.29 | 0.40 | 0.31 | | er(x)/% | 2.46 | 3.39 | 11.71 | 11.72 | | 1.03 | 0.37 | 0.67 | 0.54 | | Points | 898623 | | 898623 | | Time /s | 7.74 | | 19.38 |
|
Table 2. Measurement results of different methods
| Joint | Index | Measured value of equal height division | | Measured value of ours |
|---|
| Di | Do | S | H | Di | Do | S | H |
|---|
| Standard joint | x* /mm | 46.40 | 78.40 | 57.28 | 55.00 | | 46.40 | 78.40 | 57.28 | 55.00 | | x /mm | 47.16 | 76.36 | 55.56 | 53.60 | | 46.29 | 78.39 | 57.42 | 55.13 | | e(x)/mm | -0.76 | 2.04 | 1.72 | 1.40 | | 0.11 | 0.01 | -0.14 | -0.13 | | er(x)/% | 1.64 | 2.60 | 3.00 | 2.55 | | 0.24 | 0.01 | 0.24 | 0.24 | | Points | 766310 | | 766310 | | Time /s | 18.36 | | 18.87 | | Artificial joint① | x* /mm | 47.00 | 78.00 | 53.79 | 51.50 | | 47.00 | 78.00 | 53.79 | 51.50 | | x /mm | 47.87 | 76.84 | 52.66 | 50.63 | | 46.88 | 78.32 | 53.21 | 50.83 | | e(x)/mm | -0.87 | 1.16 | 1.13 | 0.87 | | 0.12 | -0.32 | 0.58 | 0.67 | | er(x)/% | 1.85 | 1.49 | 2.10 | 1.69 | | 0.26 | 0.41 | 1.08 | 1.30 | | Points | 814402 | | 814402 | | Time/s | 19.64 | | 19.85 | | Artificial joint② | x* /mm | 45.50 | 77.50 | 59.68 | 57.50 | | 45.50 | 77.50 | 59.68 | 57.50 | | x /mm | 46.16 | 76.81 | 58.92 | 56.89 | | 45.97 | 77.21 | 59.28 | 57.19 | | e(x)/mm | -0.66 | 0.69 | 0.76 | 0.61 | | -0.47 | 0.29 | 0.40 | 0.31 | | er(x)/% | 1.45 | 0.89 | 1.27 | 1.06 | | 1.03 | 0.37 | 0.67 | 0.54 | | Points | 898623 | | 898623 | | Time /s | 19.43 | | 19.38 |
|
Table 3. Measurement results for different space division methods
| Joint | Index | Measured value before error correction | | Measured value after error correction |
|---|
| Di | Do | S | H | Di | Do | S | H |
|---|
| Standard joint | x* /mm | 46.40 | 78.40 | 57.28 | 55.00 | | 46.40 | 78.40 | 57.28 | 55.00 | | x /mm | 46.29 | 78.39 | 57.42 | 55.13 | | 46.29 | 78.39 | 57.42 | 55.13 | | e(x)/mm | 0.11 | 0.01 | -0.14 | -0.13 | | 0.11 | 0.01 | -0.14 | -0.13 | | er(x)/% | 0.24 | 0.01 | 0.24 | 0.24 | | 0.24 | 0.01 | 0.24 | 0.24 | | Points | 766310 | | Time /s | 18.87 | | Artificial joint① | x* /mm | 47.00 | 78.00 | 53.79 | 51.50 | | 47.00 | 78.00 | 53.79 | 51.50 | | x /mm | 47.46 | 77.36 | 51.45 | 49.23 | | 46.88 | 78.32 | 53.21 | 50.83 | | e(x)/mm | -0.46 | 0.64 | 2.34 | 2.27 | | 0.12 | -0.32 | 0.58 | 0.67 | | er(x)/% | 0.98 | 0.82 | 4.35 | 4.41 | | 0.26 | 0.41 | 1.08 | 1.30 | | Points | 814402 | | Time /s | 19.85 | | Artificial joint② | x* /mm | 45.50 | 77.50 | 59.68 | 57.50 | | 45.50 | 77.50 | 59.68 | 57.50 | | x /mm | 46.36 | 76.06 | 57.12 | 55.16 | | 45.97 | 77.21 | 59.28 | 57.19 | | e(x)/mm | -0.86 | 1.44 | 2.56 | 2.34 | | -0.47 | 0.29 | 0.40 | 0.31 | | er(x)/% | 1.89 | 1.85 | 4.29 | 4.07 | | 1.03 | 0.37 | 0.67 | 0.54 | | Points | 898623 | | Time /s | 19.38 |
|
Table 4. Measurement results before and after error correction
| h /mm | H /mm | e(x)/mm | er(x)/% |
|---|
| 0.1 | 55.61 | -0.61 | 1.11 | | 0.2 | 55.52 | -0.52 | 0.95 | | 0.3 | 55.43 | -0.43 | 0.78 | | 0.4 | 55.38 | -0.38 | 0.69 | | 0.5 | 55.25 | -0.25 | 0.45 | | 0.6 | 55.53 | -0.53 | 0.96 | | 0.7 | 55.74 | -0.74 | 1.35 | | 0.8 | 55.87 | -0.87 | 1.58 | | 0.9 | 56.01 | -1.01 | 1.84 | | 1.0 | 56.12 | -1.12 | 2.04 |
|
Table 5. Effect of piece height h on algorithm accuracy
| η /(°) | H /mm | e(x)/mm | er(x)/% |
|---|
| 1 | 61.07 | -3.57 | 6.21 | | 2 | 60.17 | -2.67 | 4.64 | | 3 | 59.37 | -1.87 | 3.25 | | 4 | 58.40 | -0.90 | 1.57 | | 5 | 57.96 | -0.46 | 0.80 | | 6 | 57.18 | 0.32 | 0.56 | | 7 | 56.62 | 0.88 | 1.53 | | 8 | 56.13 | 1.37 | 2.38 | | 9 | 55.47 | 2.03 | 3.53 | | 10 | 54.10 | 3.40 | 5.91 |
|
Table 6. Effect of strip point cloud angle η on algorithm accuracy
| Dth3 | H /mm | e(x)/mm | er(x)/% |
|---|
| 0.10 | 60.75 | -3.25 | 5.65 | | 0.15 | 59.83 | -2.33 | 4.05 | | 0.20 | 59.34 | -1.84 | 3.20 | | 0.25 | 58.63 | -1.13 | 1.97 | | 0.30 | 58.14 | -0.64 | 1.11 | | 0.35 | 57.96 | -0.46 | 0.80 | | 0.40 | 57.13 | 0.37 | 0.64 | | 0.45 | 56.73 | 0.77 | 1.34 | | 0.50 | 56.31 | 1.19 | 2.07 | | 0.55 | 55.81 | 1.69 | 2.94 |
|
Table 7. Effect of threshold Dth3 on algorithm accuracy
| Dth4 | H /mm | e(x)/mm | er(x)/% |
|---|
| 0.10 | 61.03 | -3.53 | 6.14 | | 0.15 | 60.47 | -2.97 | 5.17 | | 0.20 | 59.67 | -2.17 | 3.77 | | 0.25 | 59.14 | -1.64 | 2.85 | | 0.30 | 58.66 | -1.16 | 2.02 | | 0.35 | 57.96 | -0.46 | 0.80 | | 0.40 | 57.36 | 0.14 | 0.24 | | 0.45 | 56.78 | 0.72 | 1.30 | | 0.50 | 56.21 | 1.29 | 2.24 | | 0.55 | 55.73 | 1.77 | 3.08 |
|
Table 8. Effect of threshold Dth4 on algorithm accuracy