
Xuece Miao, Keliang Ding, Tao Luo, Xiaoye He, Wei Wang, Guimin Liu. Self-Adaptive Weighted Rank-Defect 3D Bundle Adjustment of Laser Tracker[J]. Chinese Journal of Lasers, 2023, 50(6): 0604004
- Chinese Journal of Lasers
- Vol. 50, Issue 6, 0604004 (2023)
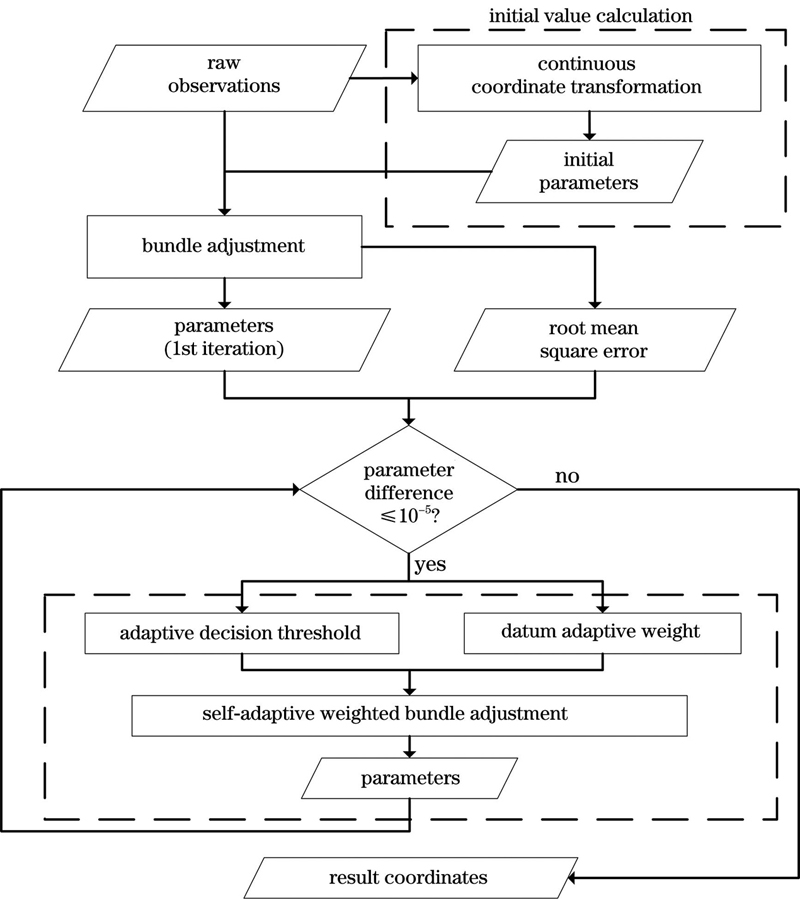
Fig. 1. Flow chart of self-adaptive weighted rank-defect 3D bundle adjustment
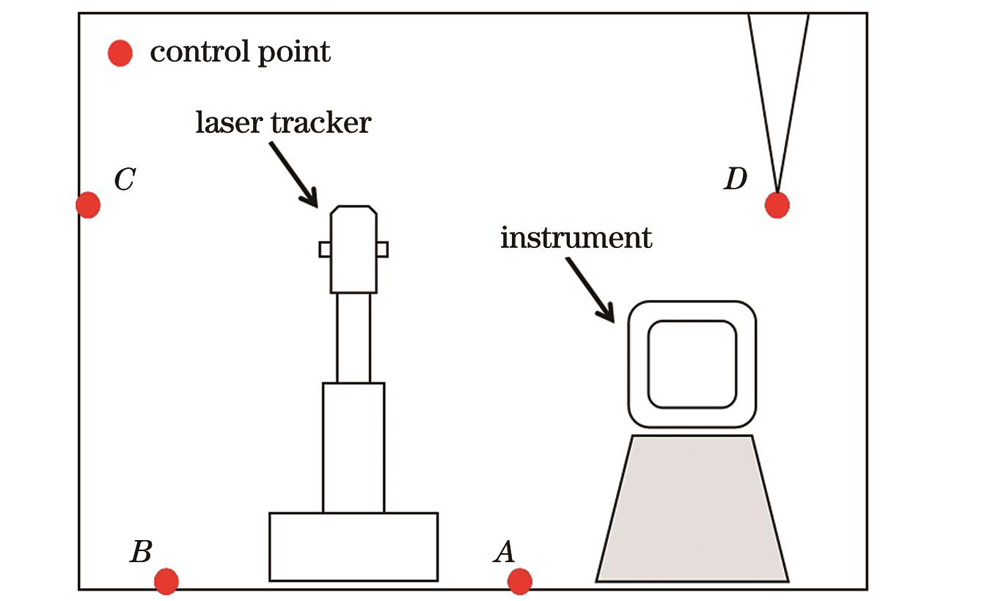
Fig. 2. Layout of instrument and control points
Fig. 3. Layout of simulated data points and observed values
Fig. 4. Simulated error diagrams. (a) Error of horizontal angle; (b) error of vertical angle; (c) error of range
Fig. 5. Adjustment results of data without gross error. (a1)-(a3) Minimum norm; (b1)-(b3) USMN; (c1)-(c3) proposed method
Fig. 6. Adjustment results of data with gross error. (a1)-(a3) Minimum norm; (b1)-(b3) USMN; (c1)-(c3) proposed method
Fig. 7. Threshold change during iteration. (a)
Fig. 8. Layout of measured points
Fig. 9. Coordinate difference between adjustment result of each method and observed value of single central station
Fig. 10. Coordinate difference between adjustment result of proposed method and that of USMN
|
Table 1. RMSE of data without gross error
|
Table 2. RMSE of data with gross error

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20