
Ying Gao, Jianhui Bin, Daniel Haffa, Christian Kreuzer, Jens Hartmann, Martin Speicher, Florian H. Lindner, Tobias M. Ostermayr, Peter Hilz, Thomas F. Rösch, Sebastian Lehrack, Franz Englbrecht, Sebastian Seuferling, Max Gilljohann, Hao Ding, Wenjun Ma, Katia Parodi, Jörg Schreiber. An automated, 0.5 Hz nano-foil target positioning system for intense laser plasma experiments[J]. High Power Laser Science and Engineering, 2017, 5(2): 02000e12
- High Power Laser Science and Engineering
- Vol. 5, Issue 2, 02000e12 (2017)
Abstract
Keywords
1 Introduction
In the past two decades, MeV ion bunches generated in intense laser–plasma interactions have attracted attention[
A key limitation of current laser-driven sources based on nanometer thin foil targets is repeatability and reproducibility, far-off the several thousands of shots required for clinically relevant experiments[
Here we present our first, operational automated nano-foil target positioning system (nFTPS). It provides space for
Sign up for High Power Laser Science and Engineering TOC. Get the latest issue of High Power Laser Science and Engineering delivered right to you!Sign up now
2 Concept of nFTPS and positioning routine
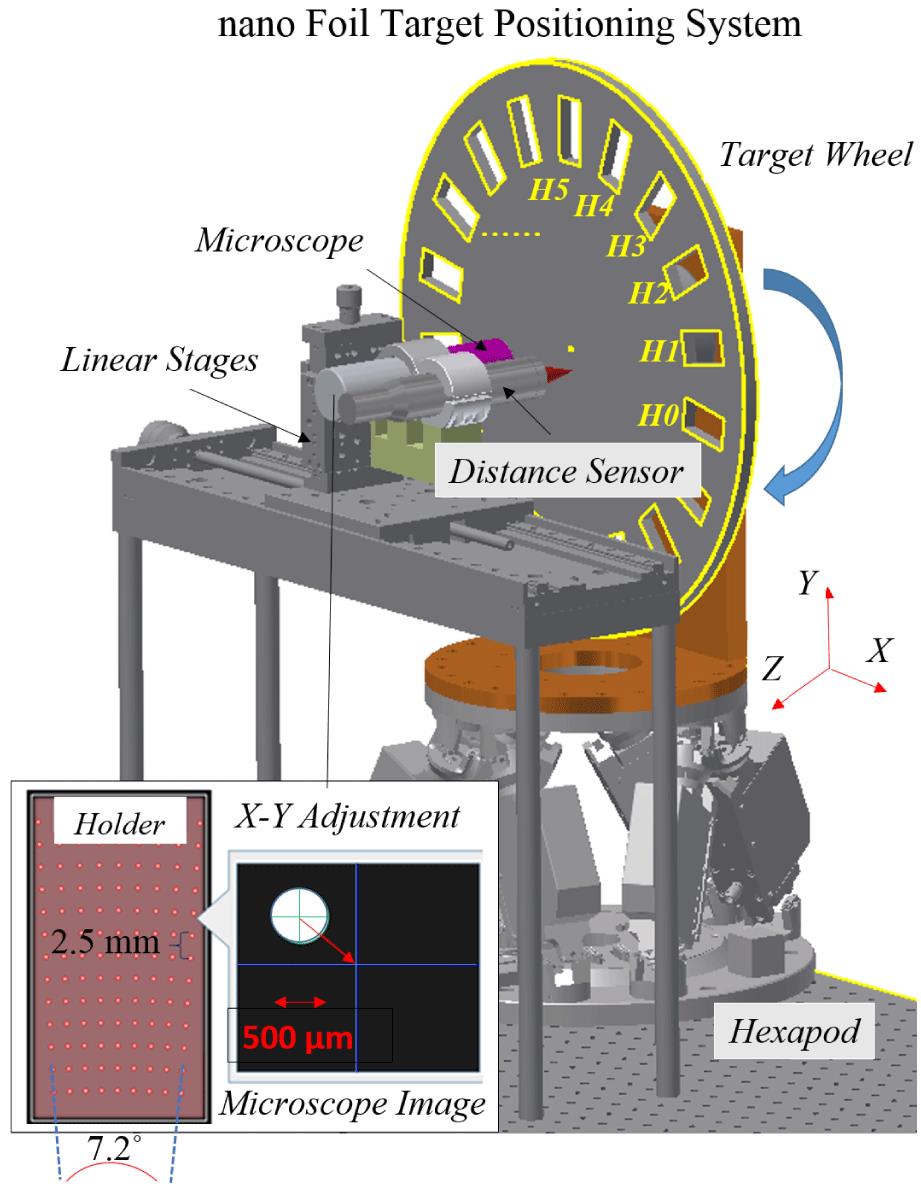
The nFTPS device is a semi-automatic searching and positioning target system consisting of four main components: a target wheel, a hexapod[
The target plane is imaged via two different magnifications (5-fold and 20-fold) onto a camera. The lower magnification arm gives an overview picture of a given target and the center of its imaging plane which is referred to the target chamber center (TCC). Accurate positioning within
Prior to the experiment, the coordinate of each target is first assigned coarsely based on the geometry of the target wheel. The targets will then be moved to the individual assigned positions with real time measurement performed with the microscope and the distance sensor. Deviations of the measured target position from the pre-assigned coordinate system are measured in
3 Characterization of nFTPS
As a first step, we have quantified the reproducibility of repositioning of the targets. For this procedure, instead of shooting the laser onto the targets, their longitudinal position was re-measured by the distance sensor at 1 Hz. As shown in Figure
The motion speed of the hexapod when switching between different targets has a strong impact on the positioning accuracy of the nFTPS. As shown in Figure
Further on, the details of the stabilization process are shown in Figure
It is obvious that this prototype is not space-efficient yet. The main design considerations were: (a) to ensure stability by a rigid construction and mediate remaining imperfections by ‘searching’ targets and pre-defining their position prior to shooting the laser; (b) to mediate damage of neighboring target by allowing for sufficient distance between targets. For PW-lasers, it is expected that the distance between targets may have to become even larger.
4 Experimental results
An experiment focused on laser-driven ion acceleration using the nFTPS was performed at the ATLAS 300 at the Laboratory for Extreme Photonics in Garching. A linearly polarized, 30 fs laser pulse (FWHM pulse duration) with central wavelength of 800 nm and energy of 2 J (fluctuation of 8%) was focused by a
We have tested our system with various target materials and thicknesses between 50 nm and
Figure
Error bars in the maximum energies result from the employed wide angle spectrometer and specify the corresponding precision at specific proton energies. We observed a shot-to-shot variation of 27% with a level of confidence of 95%. The fluctuations arise from a variety of parameters, possibly including position inaccuracies, variation of target thicknesses and other laser parameters, which can be investigated in detail in future studies.
5 Conclusions
It is shown in this work that the automated nFTPS is capable of positioning targets with 1 Hz repetition rate, providing positioning accuracy of around
References
[1] A. Macchi, M. Borghesi, M. Passoni. Rev. Mod. Phys., 85, 751(2013).
[2] J. Schreiber, P. R. Bolton, K. Parodi. Rev. Sci. Instruments, 87(2016).
[5] U. Linz, J. Alonso. Phys. Rev. Accel. Beams, 10(2007).
[6] P. Mora. Phys. Rev. Lett., 90(2003).
[8] A. Macchi, S. Veghini, T. V. Liseykina, F. Pegoraro. New J. Phys., 12(2010).
[9] A. P. L. Robinson, M. Zepf, S. Kar, R. G. Evans, C. Bellei. New J. Phys., 10(2008).
[10] A. Henig, S. Steinke, M. Schnürer, T. Sokollik, R. Hörlein, D. Kiefer, D. Jung, J. Schreiber, B. M. Hegelich, X. Q. Yan, J. Meyer-ter-Vehn, T. Tajima, P. V. Nickles, W. Sandner, D. Habs. Phys. Rev. Lett., 103(2009).
[11] X. Q. Yan, C. Lin, Z. M. Sheng, Z. Y. Guo, B. C. Liu, Y. R. Lu, J. X. Fang, J. E. Chen. Phys. Rev. Lett., 100(2008).
[12] J. Bin, W. Ma, H. Wang, M. J. V. Streeter, C. Kreuzer, D. Kiefer, M. Yeung, S. Cousens, P. S. Foster, B. Dromey, X. Yan, R. Ramis, J. Meyer-ter-Vehn, M. Zepf, J. Schreiber. Phys. Rev. Lett., 115(2015).
[14] I. J. Kim, K. H. Pae, C. M. Kim, H. T. Kim, J. H. Sung, S. K. Lee, T. J. Yu, I. W. Choi, C. L. Lee, K. H. Nam, P. V. Nickles, T. M. Jeong, J. Lee. Rev. Lett., 111(2013).
[15] L. Yin, B. J. Albright, B. M. Hegelich, K. J. Bowers, K. A. Flippo, T. J. T. Kwan, J. C. Fernández. Phys. Plasmas, 14(2007).
[18] K. M. Hofmann, U. Masood, J. Pawelke, J. J. Wilkens.. Med. Phys., 42, 5120(2015).
[19] C. Spindloe, G. Arthur, F. Hall, S. Tomlinson, R. Potter, S. Kar, J. Green, A. Higginbotham, N. Booth, M. K. Tolley. J. Phys.: Conf. Series, 713(2016).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20