Terrestrial laser scanning (TLS) technology provides an efficient and accurate method for obtaining three-dimensional tree data. The separation of branches and leaves using single-tree point clouds is required when extracting tree structure parameters or determining the above-ground biomass. Additionally the separation of branches and leaves using TLS data enhances the ecological applicability of TLS data . Therefore, an efficient method for separating branches and leaves using tree point clouds can improve the application range of TLS. Existing branch and leaf separation methods either require precise calibration of lidar instruments to obtain intensity data for branch and leaf separation or use supervised classification methods, which require a considerable amount of manual intervention to select training data, and retraining is required for trees from different environments or different tree species. They are not universal. To tackle these issues such as poor separation results, low separation efficiency, and low automation in the current TLS point cloud tree branch and leaf separation, this study further optimizes the unsupervised classification method based on geometric features and proposes a branch and leaf separation method combining the shortest path analysis algorithm and graph segmentation algorithm.
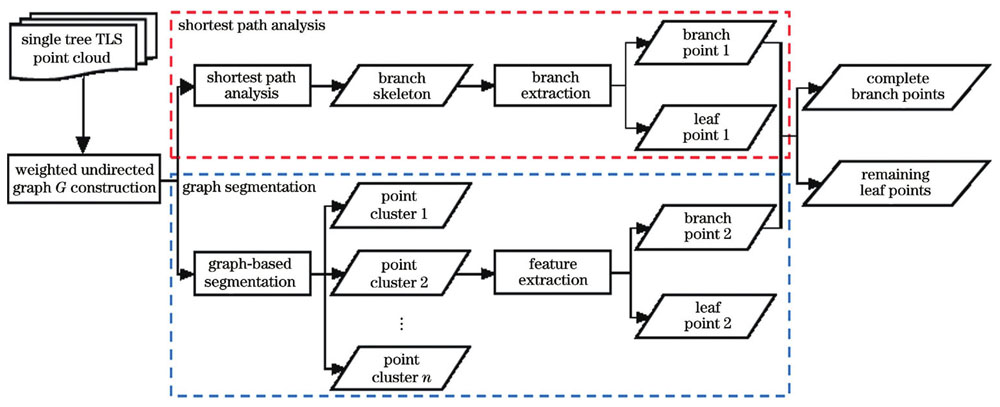
The branch and leaf separation algorithm proposed in this study uses geometric features and structural analysis to classify the point cloud of a single tree into different components. First, a graph segmentation algorithm is used based on point geometric features and point cloud density. Subsequently, according to the three-dimensional coordinate vector
This study employs three trees with different point spacings and 16 trees with different data quality from different tree species to perform quantitative and qualitative experiments to test the branch-leaf separation ability and robustness of the proposed method. First, three trees with different point spacings are separated 20 times using a pseudorandom method to select parameter values. Although the input parameters are modified several times by the pseudorandom method, the accuracy rate of each branch and leaf separation result of each tree is above 0.92. The branch points of the tree are extracted and the standard deviation of each evaluation index is observed to be below 0.01 (Table 3). Furthermore, using point cloud data of 16 trees with different data quality from different tree species for branch and leaf separation, the accuracy of branch and leaf separation of trees with missing data is not high, but the accuracies of branch and leaf separation of all trees are above 0.9 (Table 4). This indicates that the method proposed in this study has high branch and leaf separation ability and has good robustness. Moreover, the TLS separation method and the LeWos method are used to separate the branches and leaves of the three trees and the separation abilities are compared. The branch and leaf separation accuracies of the TLS separation method, the LeWos method, and the proposed method are compared (Tables 5-7). The classification indexes of this method are better than those of the TLS separation method and the LeWos method. Specifically, when the branches and leaves of the medium and small trees are separated, the evaluation indexes of the proposed method are significantly higher than those of the TLS separation method. Although the TLS separation method can thoroughly separate the tree trunk from the larger branches, it is easy to classify leaf points close to branches as branch points (Fig. 13). These tiny leaves affect the spatial structure of the dots, making it difficult to separate them. The evaluation indexes for the branch and leaf separation results of the LeWos method are good, but it is prone to misclassification when facing the buttress structure of trees. Some point clouds of some buttress structures are classified as leaf points and small branches of trees cannot be effectively separated (Fig. 14). The method proposed in this study, combined with the shortest path analysis algorithm, can effectively distinguish small leaves and extract branches to avoid the interference of leaves. The experimental results reveal that the proposed method has strong branch and leaf separation ability and high robustness.
This study proposes a branch and leaf separation method that combines the shortest path analysis algorithm and the graph segmentation algorithm using tree point clouds. The feasibility and robustness of the proposed method are verified by specific experiments. The experimental results indicate that this method can realize high-precision branch and leaf separation for trees with different spacings. The classification accuracies on three types of data reach 0.9697, 0.9469 and 0.9560, respectively, and the kappa coefficients are 0.8475, 0.8547 and 0.8925, respectively. The branch and leaf separation results obtained by the method in this study serve as references for the subsequent application of single tree analysis.