
Mengwen QIU, Hua ZHANG, Huaifang ZHOU. Path planning for nuclear radiation environments based on an improved artificial potential field A* algorithm[J]. Journal of Radiation Research and Radiation Processing, 2022, 40(6): 060601
Journals >Journal of Radiation Research and Radiation Processing >Volume 40 >Issue 6 >Page 060601 > Article
- Journal of Radiation Research and Radiation Processing
- Vol. 40, Issue 6, 060601 (2022)
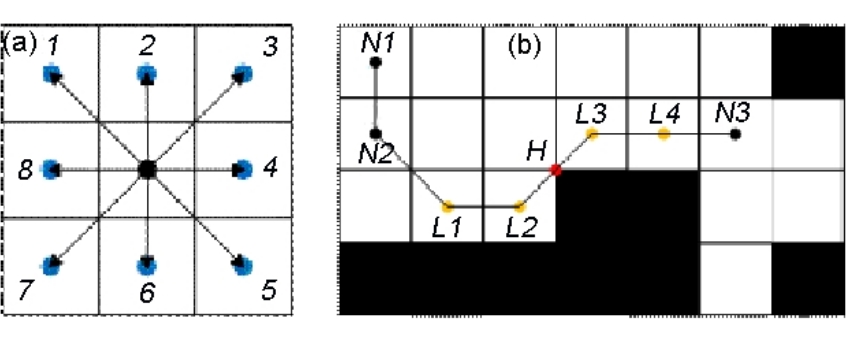
Fig. 1. Environmental modelling: (a) mode of search; (b) raster maps and risk points
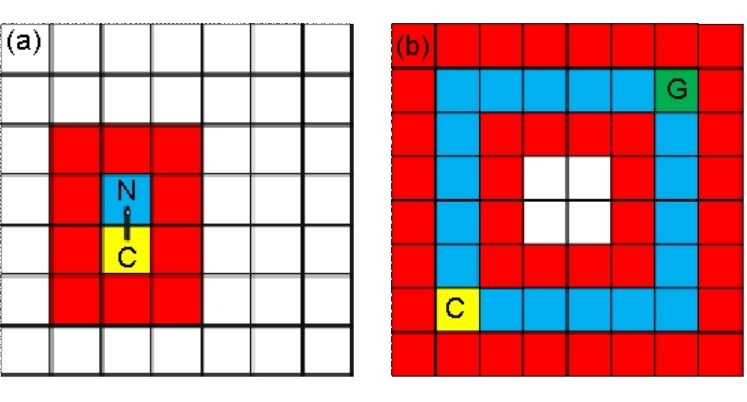
Fig. 2. Heuristic function selection of A* algorithm: (a) dose rate selection of adjacent grids; (b) selection of estimated path dose rate
Fig. 3. Artificial potential field forces
Fig. 4. Comparison with the cited literature algorithm after improving the evaluation function in this paper:(a) comparison of the number of search nodes; (b) total dose comparison (color online)
Fig. 5. Comparison diagram of the algorithm after the introduction of artificial potential field influence:(a) 30×30 map; (b) 50×50 map
Fig. 6. Comparison diagram of algorithm after introducing dynamic coefficient: (a) 30×30 map; (b) 50×50 map
|
Table 0. [in Chinese]
|
Table 1. Comparison of experimental data of each algorithm
|
Table 2. Comparison of experimental data of each algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20