
Liping Chen, Yongjian Xu, Zichen Yu, Rixin Wang, Xufeng Peng, Yizhen Xu, Ling Yu. Neutral beam infrared image distortion correction based on vanishing point detection[J]. High Power Laser and Particle Beams, 2023, 35(2): 029001
- High Power Laser and Particle Beams
- Vol. 35, Issue 2, 029001 (2023)
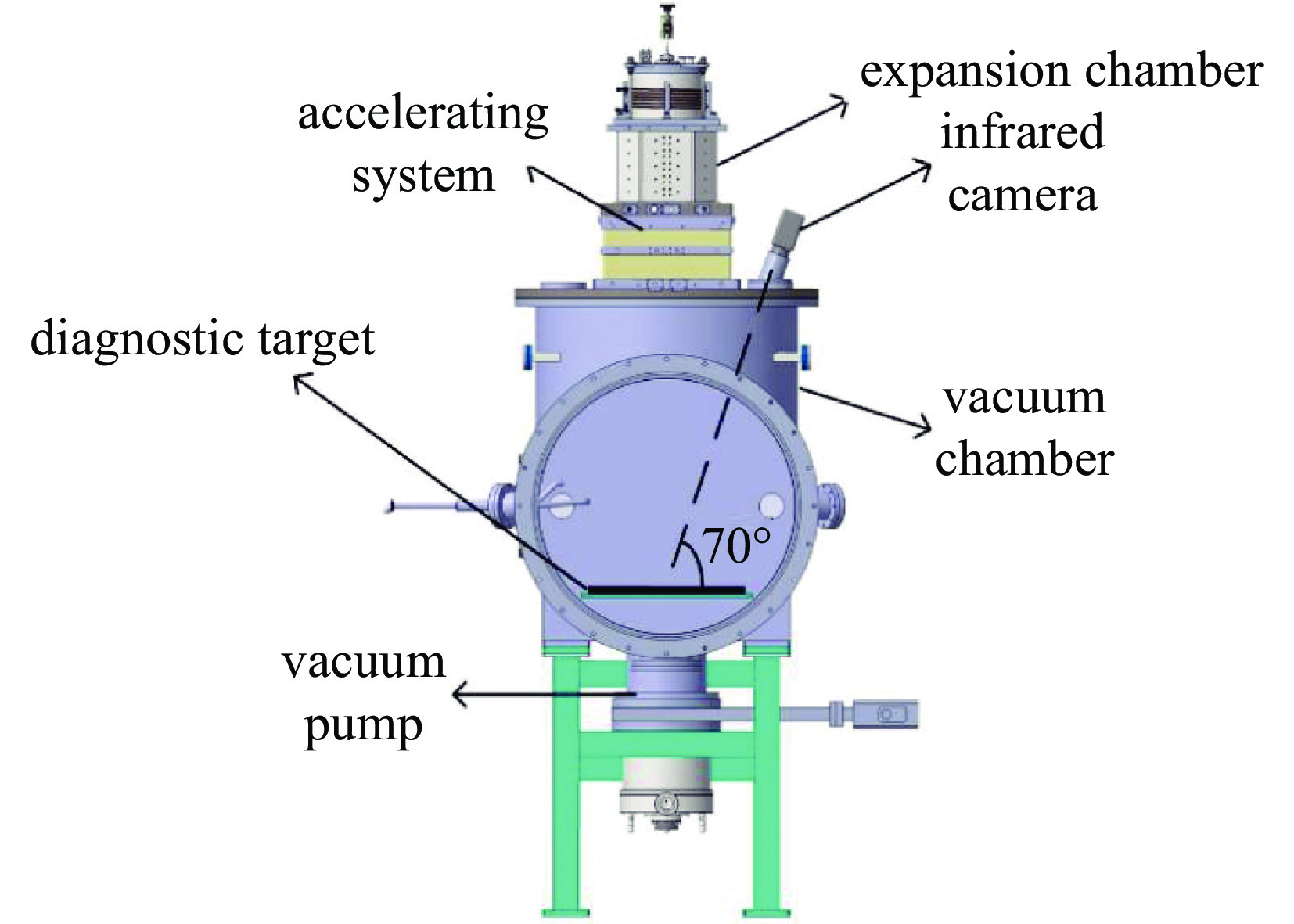
Fig. 1. Section of experimental platform
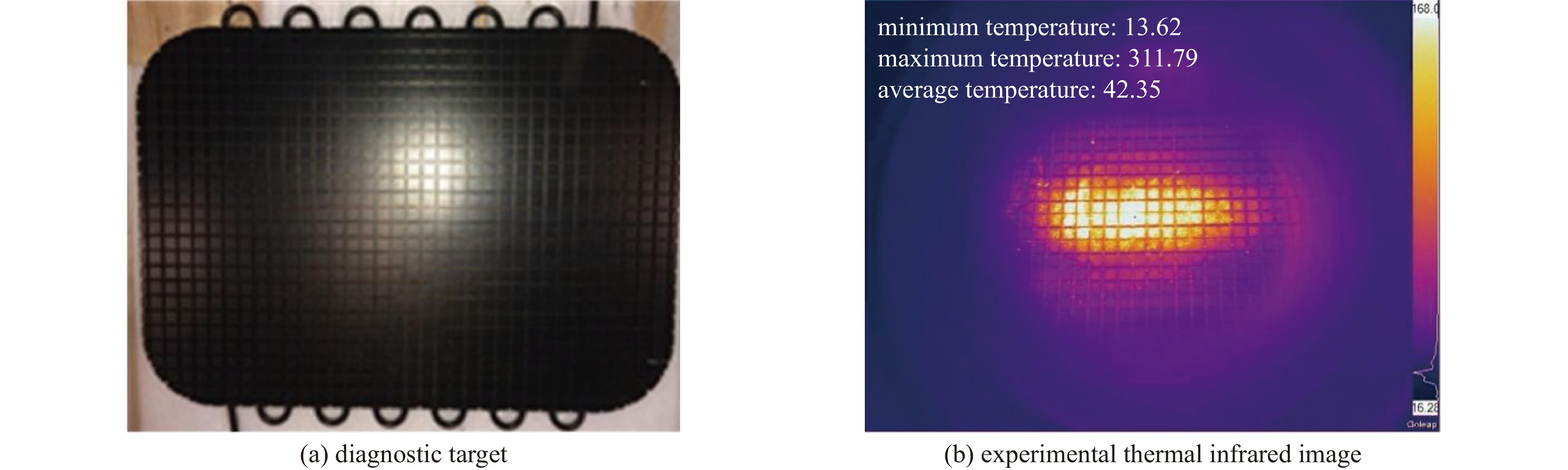
Fig. 2. Diagnostic target and experimental thermal infrared image
Fig. 3. Flowchart of image rectification
Fig. 4. Results of line segment detection after Sobel convolution
Fig. 5. Diagram of line segment relations
Fig. 6. Result of image rectification
Fig. 7. Changes in temperature
Fig. 8. Comparison of detection results of each line segment detection algorithm
|
Table 1. Line segment clustering algorithm
|
Table 2. Comparison of linear detection methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20