
Huijun YU, Xiaoguang LI, Wenjiang SHEN. Scanning Angle Compensation of MEMS Mirror Applied in Monocular 3D Camera[J]. Acta Photonica Sinica, 2021, 50(12): 1212001
- Acta Photonica Sinica
- Vol. 50, Issue 12, 1212001 (2021)
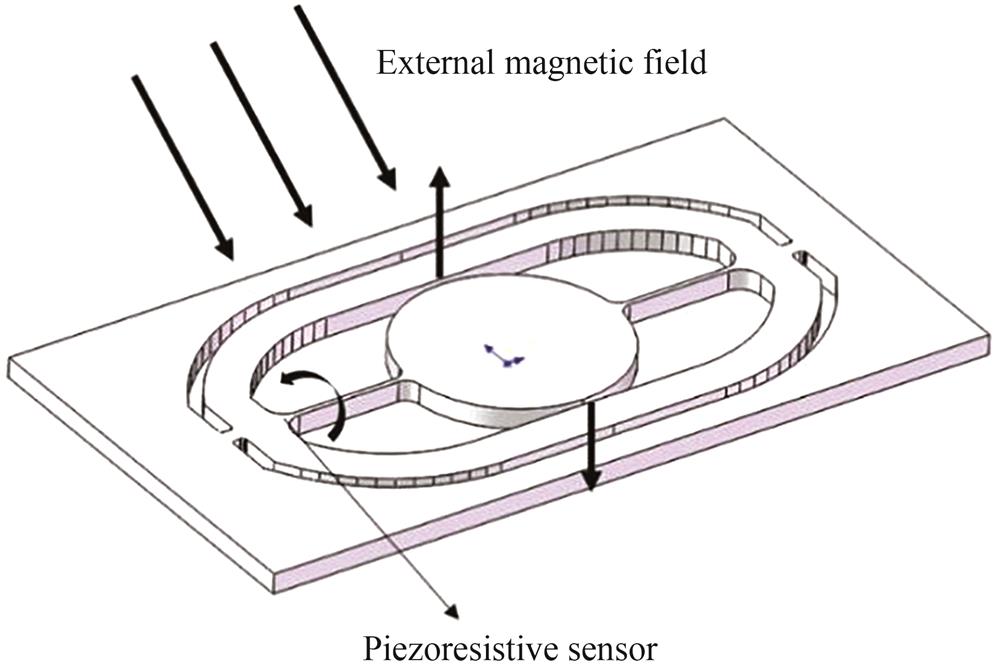
Fig. 1. The basic structure of MEMS micromirror with integrated piezoresistive sensor
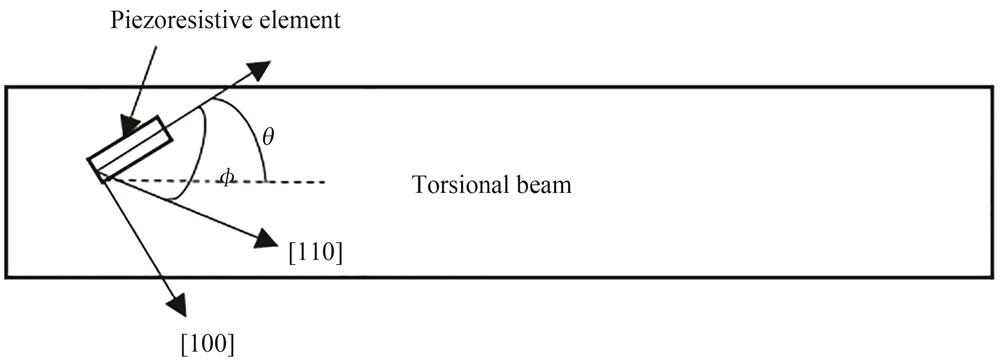
Fig. 2. Crystal orientation of piezoresistive element and torsion beam
Fig. 3. The relationship between piezoresistive coefficient and impurity concentrations
Fig. 4. Projection optical engine and projection stripe pattern
Fig. 5. Monocular 3D camera measures the distance between the camera and the white wall(open-loop control MEMS scanner)
Fig. 6. The relationship between the FOV and the temperature (open-loop control)
Fig. 7. Measure system of the piezoresistive sensor performance
Fig. 8. Output amplitude of piezoresistive sensor at different scan angle FOV(input voltage 3.3 V)
Fig. 9. Piezoresistive output and temperature calibration system
Fig. 10. The relationship between the piezoresitive output amplitude and the temperature
Fig. 11. The control logic block diagram of scanning angle of MEMS micromirror
Fig. 12. The relationship between the FOV of MEMS scanning angle and the temperature (open-loop control and closed-loop control)
Fig. 13. Monocular 3D camera
Fig. 14. Monocular 3D camera measures the distance between the camera and the white wall
| ||||||||||||||||||||||||||||||||||||||||
Table 1. The calculated results of the piezoresistive coefficients


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20