
Yue Zheng, Ming-Jie Sun, Zhi-Guang Wang, Daniele Faccio. Computational 4D imaging of light-in-flight with relativistic effects[J]. Photonics Research, 2020, 8(7): 1072
- Photonics Research
- Vol. 8, Issue 7, 1072 (2020)
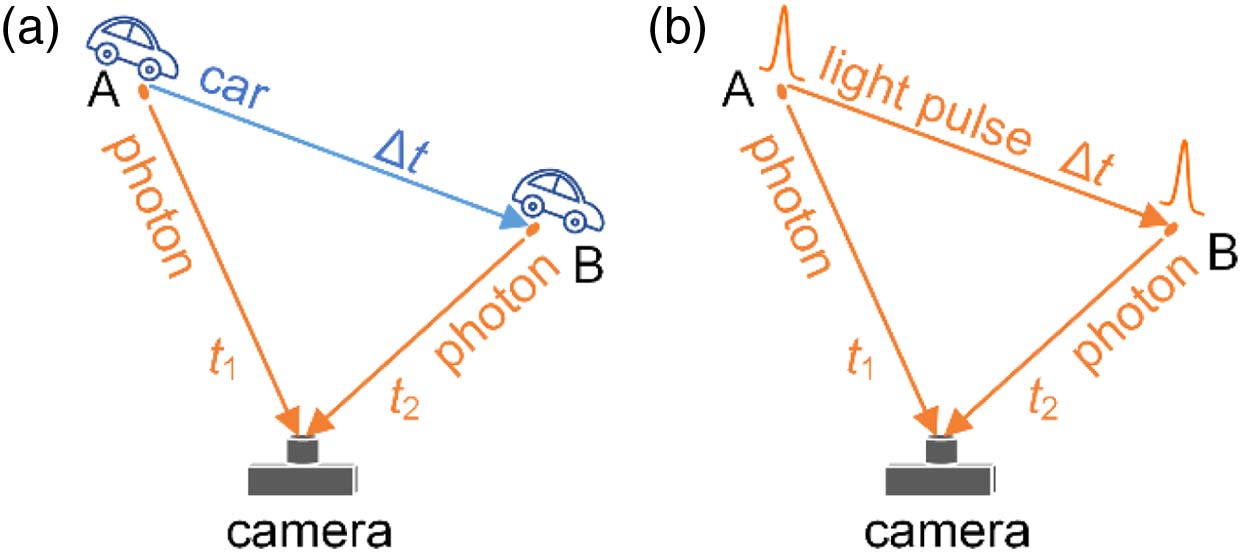
Fig. 1. Schematics of difference between imaging (a) a moving car and (b) a flying light pulse. Δ t t 1 t 2
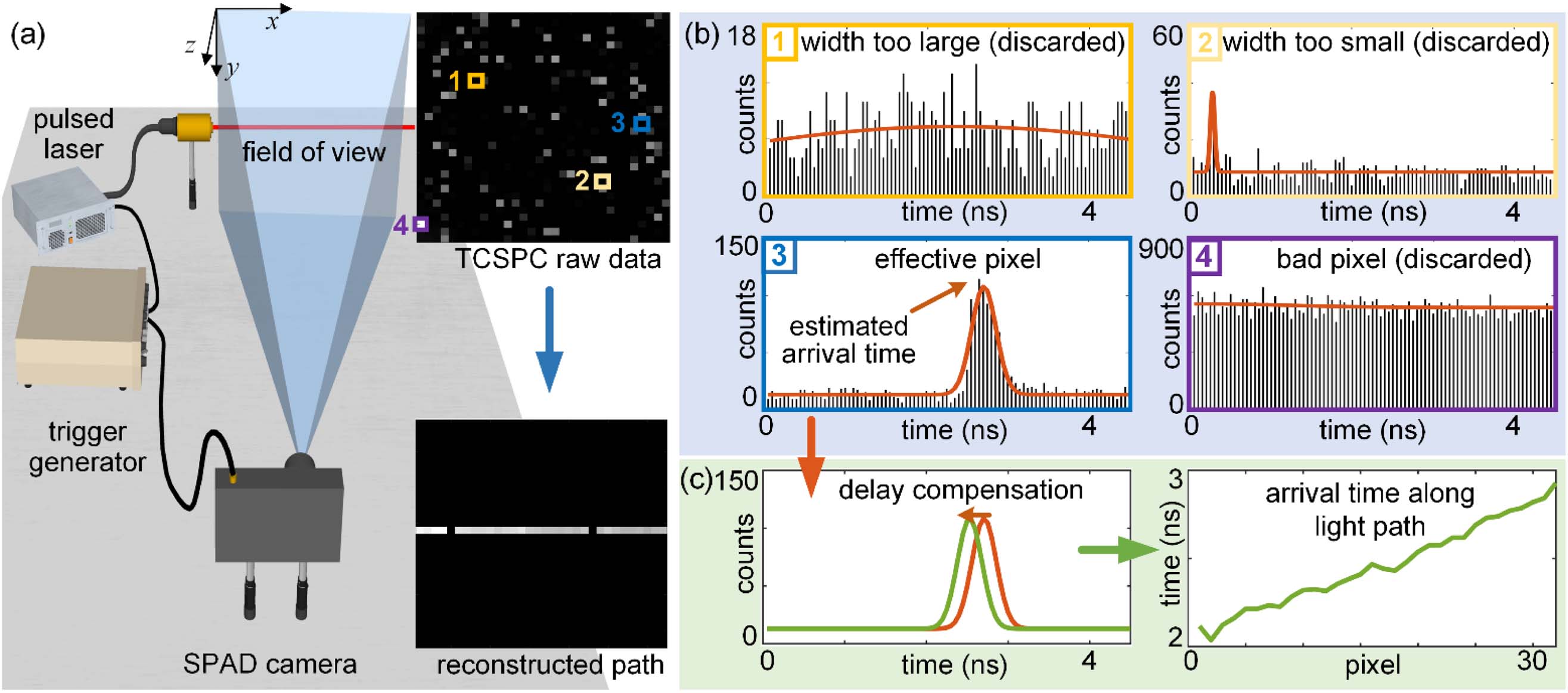
Fig. 2. Experimental system for light-in-flight measurement and data processing. (a) In the experiment, the pulsed laser and the SPAD camera are synchronized via a trigger generator. Placed at z = 0 mm z = 535 mm x – y z = 0 mm 245 mm × 245 mm t a x – y x y t a
Fig. 3. Optical model for the computation of propagation time t α θ ∠ C B G ∠ B A F s l BA and BE , respectively. BE is the projection of BD on the reference plane (RP).
Fig. 4. Reconstruction procedure for consecutive light paths. (a) For light path 1 (LP1), the reference plane (RP1) is the x – y x – y
Fig. 5. Experimental results of the propagation angle estimation. (a) Angle error resulting from using different numbers of t a i α t t a α
Fig. 6. Experimental 4D reconstruction of light-in-flight. (a) A reconstruction of a laser pulse reflected by two mirrors is demonstrated. The RMSEs of the reconstruction (red line) to the ground truth (dashed line) in position and time are 1.75 mm and 3.84 ps, respectively. (b) The difference between the calculated propagation time t t a

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20