
Wang Weisong, Wang Xinyu, Li Panyuan, Shi Yishi. A Dual-Lens Laser Surface Profile Measurement Method for Solving the Problem of Light Stripe Occlusion[J]. Chinese Journal of Lasers, 2020, 47(11): 1104002
- Chinese Journal of Lasers
- Vol. 47, Issue 11, 1104002 (2020)
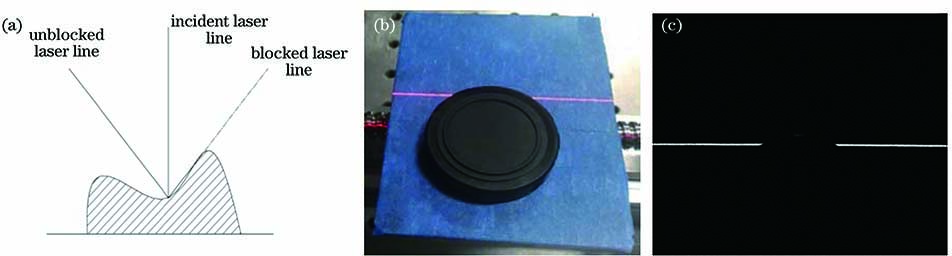
Fig. 1. Light stripe occlusion phenomenon. (a) Self-occlusion; (b) physical map; (c) CMOS acquisition map
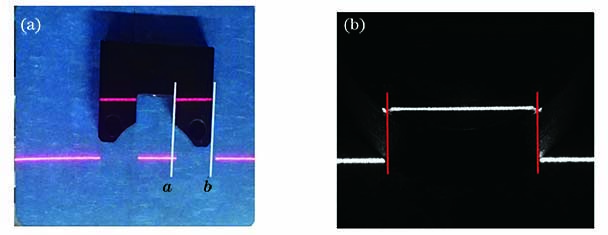
Fig. 2. Intersection and loss of light stripe. (a) Physical map; (b) CMOS acquisition map
Fig. 3. Loss and intersection of light stripe. (a) Loss and intersection of light stripe caused by laser divergence angle; (b) loss and intersection of light stripe caused by depth of field
Fig. 4. Dual-lens direct incidence laser triangulation
Fig. 5. Dual-lens laser triangulation method
Fig. 6. Structure of dual-lens system. (a) Model map; (b) physical map; (c) dual-lens direct incidence laser triangulation support structure
Fig. 7. Light stripe center extraction
Fig. 8. Data offset
Fig. 9. Optimal offset and variance
Fig. 10. Three-dimensional recovery results under light stripe occlusion. (a) 12.5° to the left; (b) 12.5° to the right; (c) 12.5° light stripe occlusion on the left ; (d) 12.5° light stripe occlusion on the right
Fig. 11. Lens cover reconstruction. (a) Reconstruction before matching fusion; (b) reconstruction after matching fusion; (c) reconstruction after modifying data difference; (d) surface features
Fig. 12. Cylinder data fusion diagrams. (a) Left lens data; (b) right lens data; (c) complete cylindrical topography
Fig. 13. Comparison of single and double lens recovery results. (a) Single lens recovery result; (b) dual-lens recovery result
Fig. 14. Comparison of two algorithms. (a) Progressive algorithm; (b) global algorithm
Fig. 15. Optimal offset and variance after fitting
Fig. 16. Relative error of optimal offset
|
Table 1. Percentage of missing data in the full data%
|
Table 2. Comparison of data offsets between progressive algorithm and global algorithmpixel
|
Table 3. Fitting coefficient of offset


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20