
Chao Li, Xianyi Cao, Kan Wu, Gaofeng Qiu, Minglu Cai, Guangjin Zhang, Xinwan Li, Jianping Chen. Blind zone-suppressed hybrid beam steering for solid-state Lidar[J]. Photonics Research, 2021, 9(9): 1871
- Photonics Research
- Vol. 9, Issue 9, 1871 (2021)

Fig. 1. Schematic illustration of cylindrical lens-based beam-steering device. Inset: Cross-section of (i) thermal switch and (ii) staircase grating.
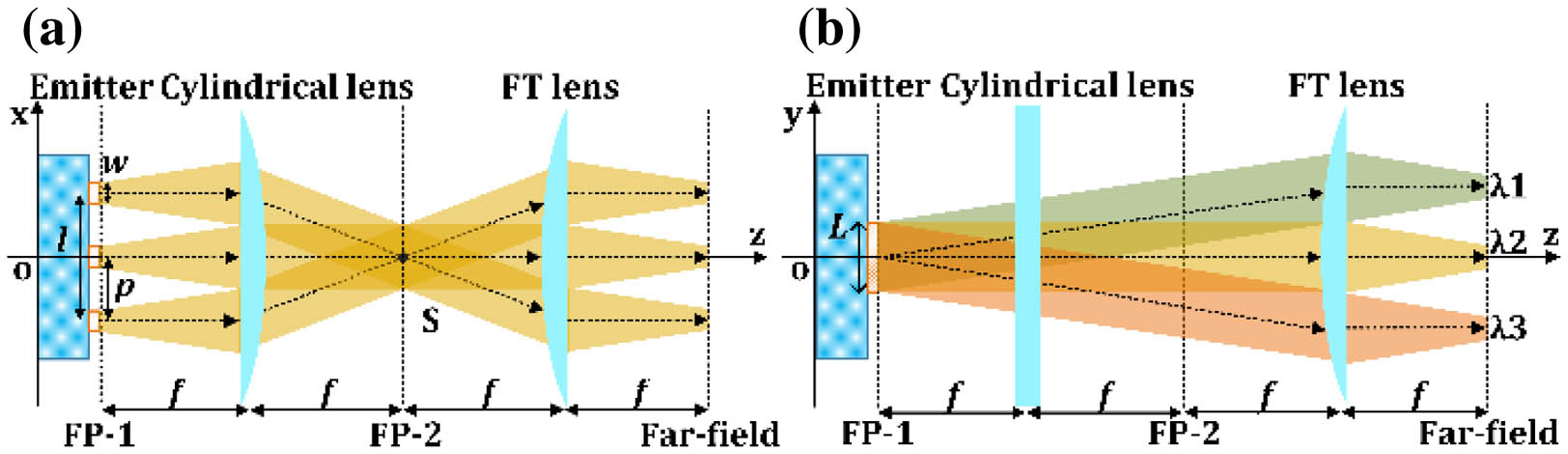
Fig. 2. Principle of beam steering in (a) x o z y o z
Fig. 3. (a) Photograph of the chip with switch and emitter array. Inset: Radiation intensity of staircase grating captured by an infrared camera. (b) Photograph of the beam-steering device. (c) Speed measurement of the thermo-optical switch. (d) SEM image of the staircase grating. Inset: Zoom-in image. (e) Comparison of radiation intensity between staircase and normal gratings.
Fig. 4. (a) Experimental setup for far-field measurement of grating. (b) Far-field beam pattern of grating with wavelength range of 110 nm. (c) Experimental setup for far-field measurement of LABS device. (d) Far-field beam-steering pattern by emitter selecting and wavelength tuning. (e) Typical transmission spectrum of a 1 × 2 θ
Fig. 5. Crosstalk between two grating emitters with different gaps. Inset: Simulated mode distribution from a finite-difference-eigenmode (FDE) solver.
Fig. 6. Near-field beam pattern with one grating lit up in grating emitter array with gaps of (a) 1.5 μm and (b) 0.6 μm. Near-field beam pattern with all gratings lit up with gaps of (c) 1.5 μm and (d) 0.6 μm.
Fig. 7. Far-field beam-steering pattern realized by (a) 16-channel 0.6 μm gap emitters selecting and wavelength tuning, (b) wavelength sweep, and (c) 16-channel emitters selecting.
Fig. 8. Experimental setup of target detection with the beam-steering device. Inset: Output spectra and waveforms of (i) pulsed laser, (ii) pulse picker, and (iii) spectral filter.
Fig. 9. Picture of experimental setup of Lidar. Inset: Picture of LABS chip with electrical control.
Fig. 10. (a) Optical spectrum of the light source. (b) Waveforms of reference signal and two returning signals scattered by the targets at 1.08 and 11.22 m.
Fig. 11. Waveforms of returning signals from different directions along (a) emitter channels of 1, 4, 8, 12, and 16 and (b) wavelength channels from 1541 to 1561 nm.
Fig. 12. (a) Time delays of returning pulses with respect to target distance in three measurements from eighth emitter channel at 1550 nm. (b) Ranging results comparison between beam-steering devices with 121 and 0.6 μm spacing grating array. Inset: Zoomed view of ranging results of the device with 0.6 μm spacing grating array.
Fig. 13. Experiment setup of FMCW Lidar system based on LABS.
Fig. 14. Waveforms of beating signal from targets of (a) 0.3 m, (b) 0.6 m, and (c) 1 m. (d) Electrical spectra of beating frequencies from three targets. (e) Range of targets with respect to beating frequency.
|
Table 1. Performance Comparison of Hybrid LABS Devices
|
Table 2. Performance Comparison of Solid-State Lidars with Different Beam Steering and Ranging Technologies

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20