
Wu Junlong, Guo Zhenghua, Chen Xianfeng, Ma Shuai, Yan Xu, Zhu Licheng, Wang Shuai, Yang Ping. Three-Dimensional Measurement Method of Light Field Imaging Based on Deep Learning[J]. Chinese Journal of Lasers, 2020, 47(12): 1204005
- Chinese Journal of Lasers
- Vol. 47, Issue 12, 1204005 (2020)
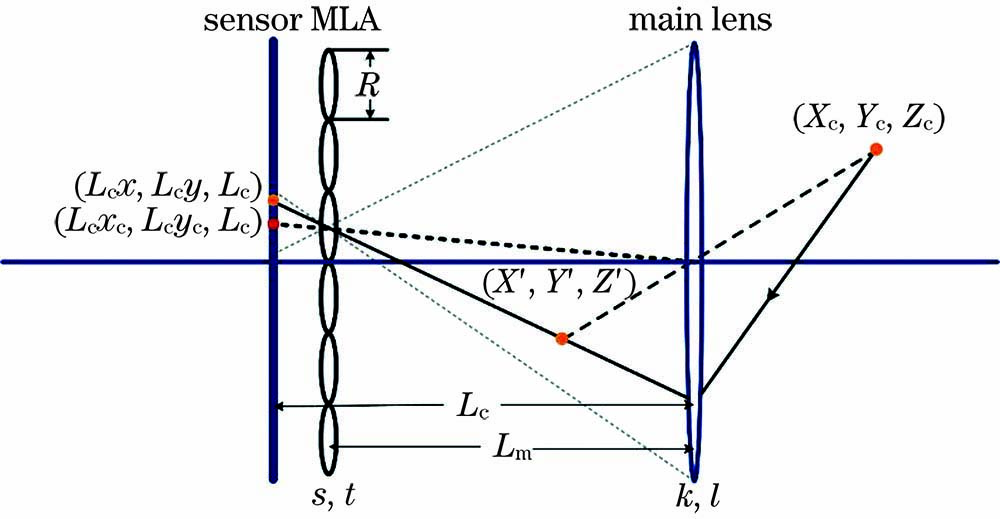
Fig. 1. Projection model of light field camera
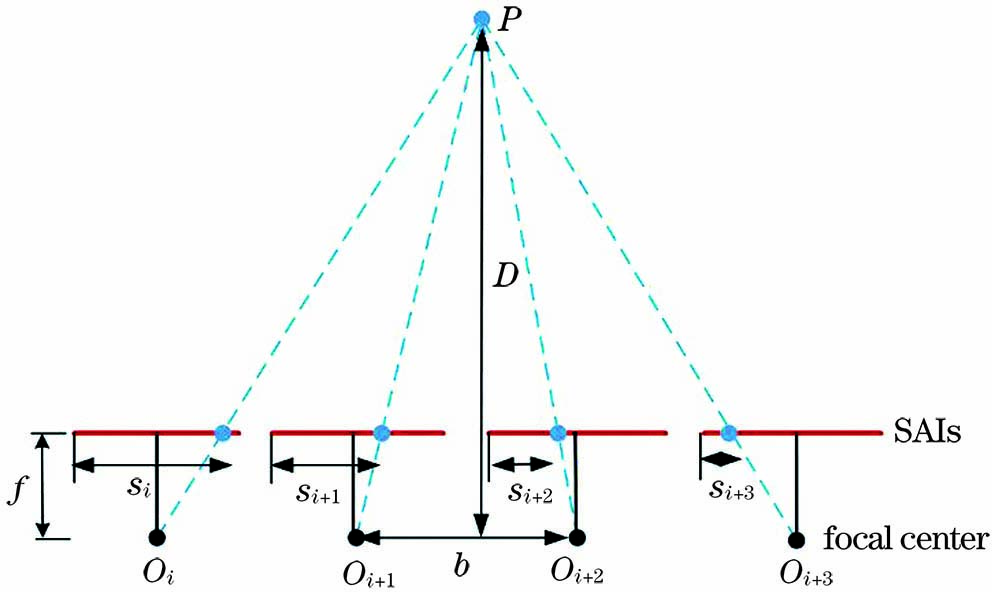
Fig. 2. Relationship between disparity and depth
Fig. 3. Illustration of equivalent baselines
Fig. 4. Structure of network
Fig. 5. Illustration of network input
Fig. 6. Center view and GT disparity of synthetic datasets
Fig. 7. Test results of synthetic dataset
Fig. 8. Test results of real dataset
Fig. 9. Three-dimensional reconstruction results of test scene
Fig. 10. Measurement of real scene scale. (a) Test scene; (b) disparity map; (c) three-dimensional reconstruction structure
|
Table 1. Badpixel(0.07) comparison of different algorithms
|
Table 2. MSE comparison of different algorithms
|
Table 3. Runtime comparison of different algorithms unit: s

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20